Introduction
When you are reversing, you will see the distance between the car and the surrounding obstacles to avoid collision. The device for detecting the distance is an ultrasonic sensor. In this experiment, you will learn how the ultrasonic wave detects the distance.
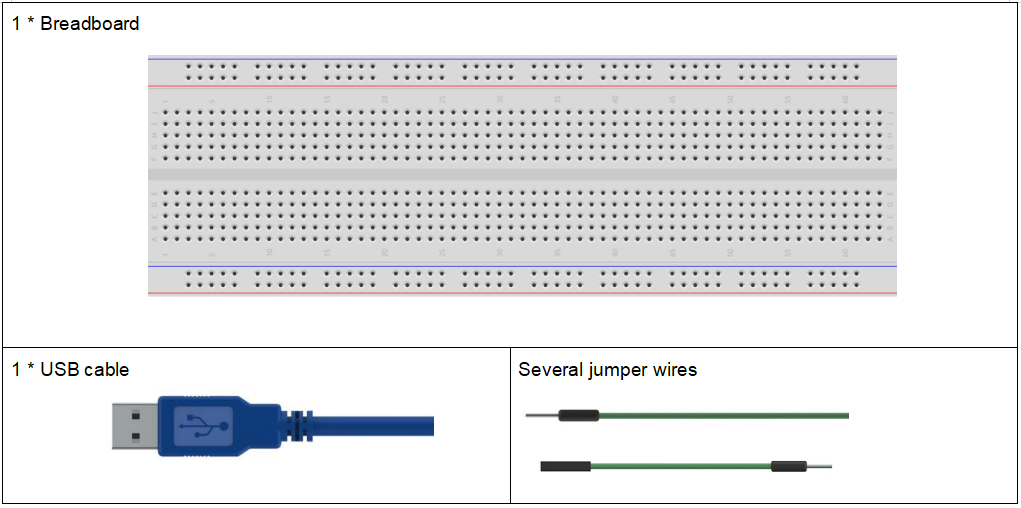
Components
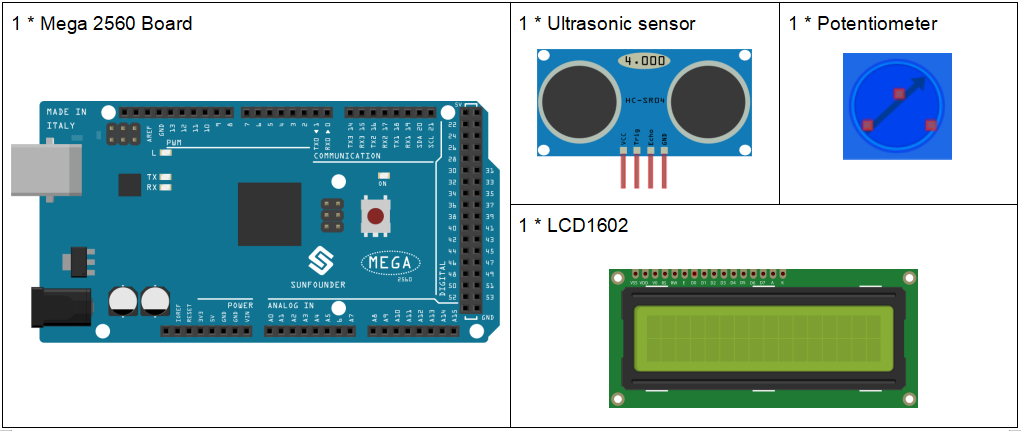
Experimental Principle

The ultrasonic distance sensor is really useful and widely applicable in our daily life. It has two probes. One is to send ultrasonic waves and the other is to receive the waves and transform the time of sending and receiving into a distance, thus detecting the distance between the device and an obstacle. In practice it is really convenient and functional.
The ultrasonic ranging module HC-SR04 provides 2cm-700cm non-contact measurement function, and the ranging accuracy can reach 3mm. Stable signal can be ensured within 5m, and signal gradually fades beyond 5m till disappearing at 7m position.
The module includes ultrasonic transmitters, receiver and control circuit. The basic principle of work:
- Using IO trigger for at least 10us high level signal;
- The module automatically sends eight 40 kHz square waves and detect whether there is a pulse signal sent back.
- If there’s a signal sent back, output a high level through pin ECHO; the time duration is the time from sending the ultrasonic to the returning.
Thus, test distance = (high level time × velocity of sound (340M/S) / 2.
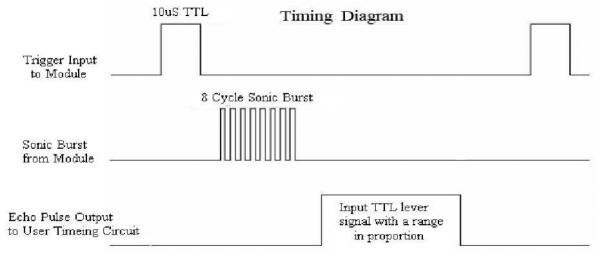
The timing diagram is as shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8-cycle burst of ultrasound at 40 kHz and raise its echo. The echo is a distance object that is pulse width and the range in proportion .You can calculate the range through the time interval between sending trigger signal and receiving echo signal. Thus,
uS / 58 = centimeters or uS / 148 =inch; or: the range = high level time * velocity (340M/S) / 2; You’re recommended to use over 60ms measurement cycle, in order to prevent conflicts between trigger signal and echo signal.
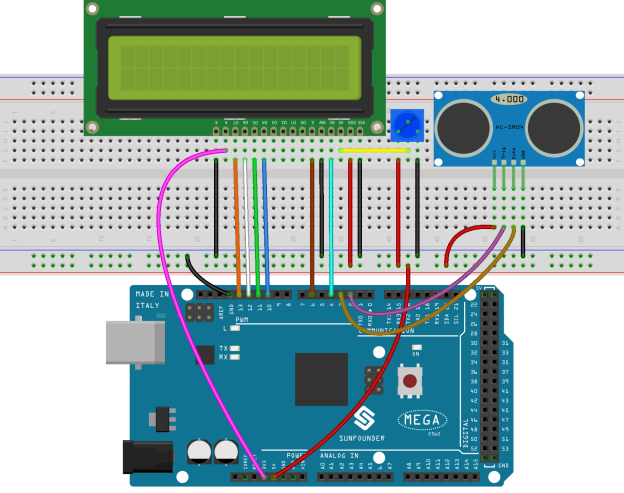
The schematic diagram:The schematic diagram:
Experimental Procedures
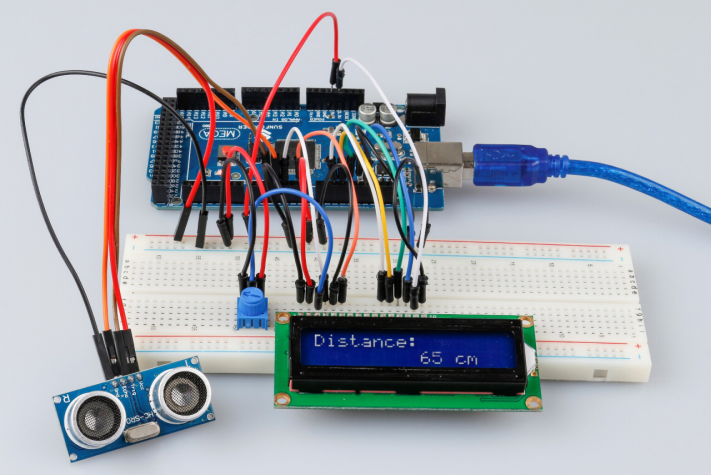
Step 1: Build the circuit
Step 2: Open the code file.
Step 3: Select the Board and Port.
Step 4: Upload the sketch to the board.
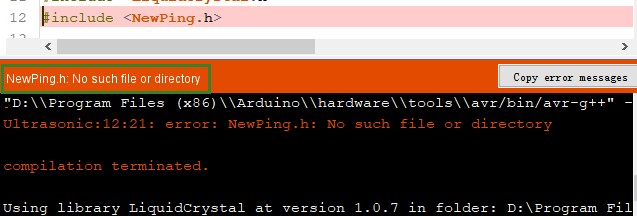
Note:If you receive the following error, it is because you didn’t add a library named NewPing, please refer to Lesson 2 Add libraries to add it.
Now, if you use a piece of paper to approach or keep it far away from the sensor. You will see the value displayed on the LCD changes, which indicates the distance between the paper and the ultrasonic sensor.
Code Analysis
Code Analysis 15-1 Initialize the ultrasonic sensor and LCD1602
#include <LiquidCrystal.h> // use #include to define the header file.
#include <NewPing.h> // use #include to define the header file.
LiquidCrystal lcd(4, 6, 10, 11, 12, 13);//lcd(RS,E,D4,D5,D6,D7)
#define TRIGGER_PIN 2 // trig pin on the ultrasonic sensor attach to pin2 .
#define ECHO_PIN 3 // echo pin on the ultrasonic sensor attach to pin3.
#define MAX_DISTANCE 400 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.Create a NewPing variable sonar. The basic format of NewPing is: NewPing (uint8_t trigger_pin, uint8_t echo_pin, int max_cm_distance). Here uint8 comes up again. As we mentioned previously in lesson 8 of the RFID series, uint means an unsigned integer and 8 means 8 bits. So a value in the uint8 format here means an unsigned-char type value.
Code Analysis 15-2 Convert the time to distance
unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).ping() here is to calculate the time from pulse sending to receiving. Define a vairal uS and assign the time to it. Its unit should be microsecond (us).
int distance = uS / US_ROUNDTRIP_CM;uS / US_ROUNDTRIP_CM is a formula to convert the time between ping sending and receiving into a distance. The unit is cm.
Code Analysis 15-3 Display the distance on the LCE1602
lcd.setCursor(0, 0); //Place the cursor at Line 1, Column 1. From here the characters are to be displayed
lcd.print("Distance:"); //Print Distance: on the LCD
lcd.setCursor(0, 1); //Set the cursor at Line 1, Column 0
lcd.print(" "); //Here is to leave some spaces after the characters so as to clear the previous characters that may still remain.
lcd.setCursor(9, 1); //Set the cursor at Line 1, Column 9.
lcd.print(distance); // print on the LCD the value of the distance converted from the time between ping sending and receiving.
lcd.setCursor(12, 1); //Set the cursor at Line 1, Column 12.
lcd.print("cm"); //print the unit "cm"