In the process of assembling, there may occur the two feet are not on the ground or inclined to another direction, thus you can adjust by the way as shown below:
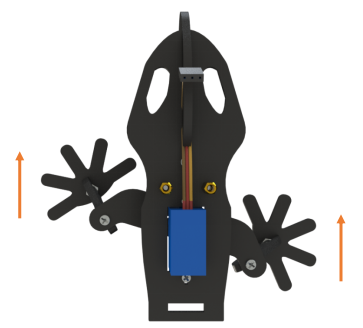
Case 1: The forefeet are inclined
- The left foot is in front, but the right one is behind
Step 1: Open Lizard_robot.ino file under the path Bionic Robot Kit for Arduino – Lizard\Code\Lizard_robot.
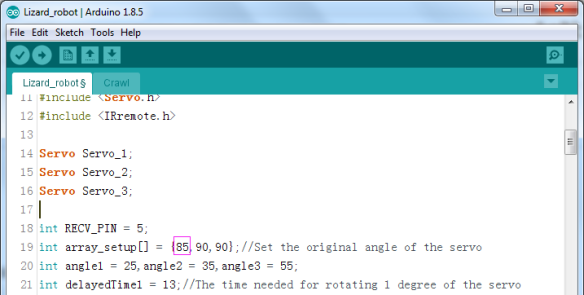
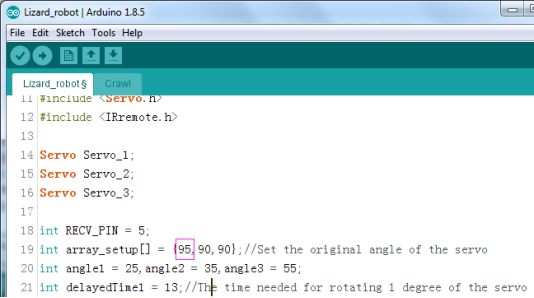
Step 2: Find the statement: int array_setup[] = {90,90,90};//Set the original angle of the servo.
The three 90 inside the array stands for the angle of the three servos, the forefeet are controlled by number 1 servo. When the left foot is in front and the right one is behind, you should minus the first value of 90, but do not decrefase too much in one time.
Step 3: Upload the code to the Sensor Shield.
If it looks still inclined then continue to decrease until it looks vertical to its body.
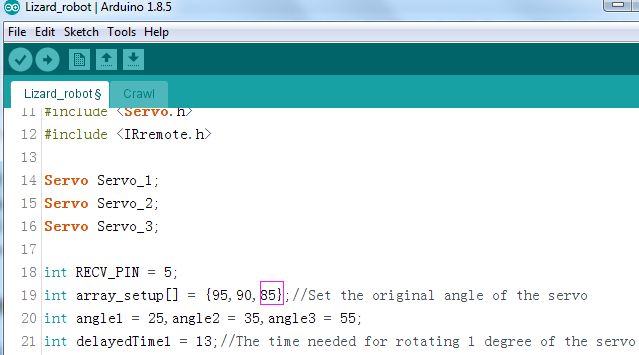
- The left foot is behind but the right is in front.
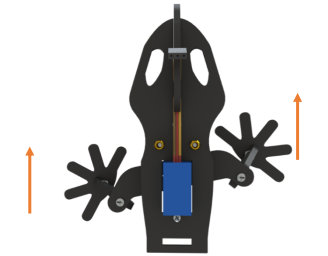
You need to increase the value of the first servo.
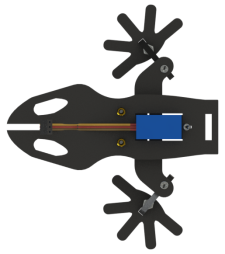
Case 2: The back foot is inclined
- The left foot is in front, the right foot is behind

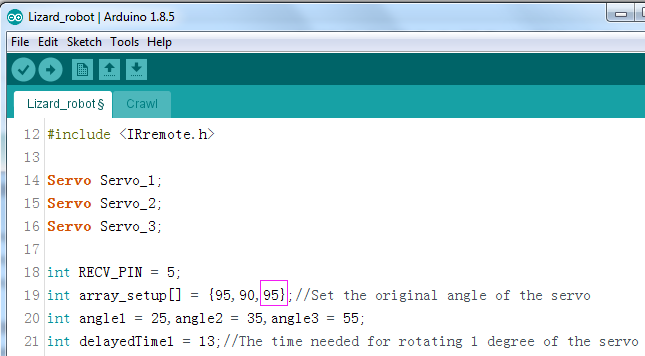
The back leg is controlled by servo 3, when the left leg is in front but the right one is behind, the third value in the array need be decreased.
2) The left leg is in back, but the right one is in front

Increase the value of the third 90 in the array.
Case 3: The Lizard can’t stand steadily
When the head is deviation counter-clockwise and one of the forefoot can’t stand steadily, the second 90 in the array need to be decrease.

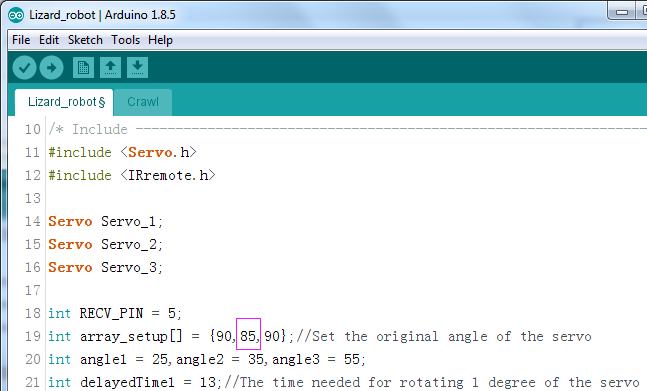
If it is clockwise, the second 90 need to be increased. When finishing adjusting, you can control the Lizard by remote controller.
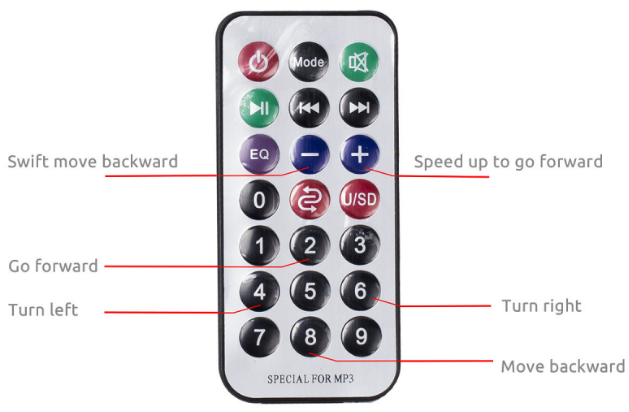
Now the Lizard is complete adjust, you can use the remote controller to control the Liard moving.
From the figure below, the 2 button to control Liard go forward, 4 to turn left, 6 to turn right, 8 to move backward. The”-” and “+” button let Liard speed up to go backward and forward.
If you want to learn to how to set one button to control Lizard moving, you can refer to: How to use Lizard robot with Mixly
Copyright Notice
All contents including but not limited to texts, images, and code in this manual are owned by the SunFounder Company. You should only use it for personal study, investigation, enjoyment, or other non-commercial or nonprofit purposes, under the related regulations and copyrights laws, without infringing the legal rights of the author and relevant right holders. For any individual or organization that uses these for commercial profit without permission, the Company reserves the right to take legal action.