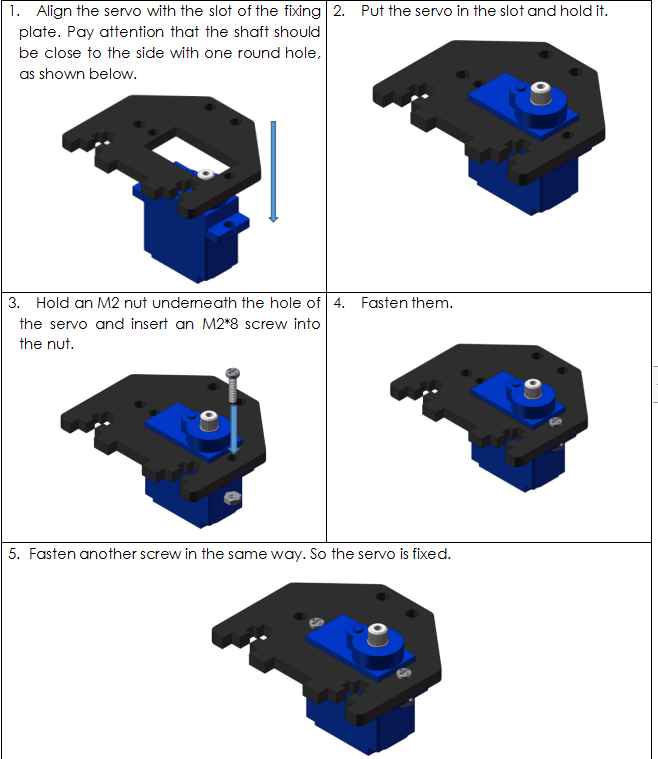
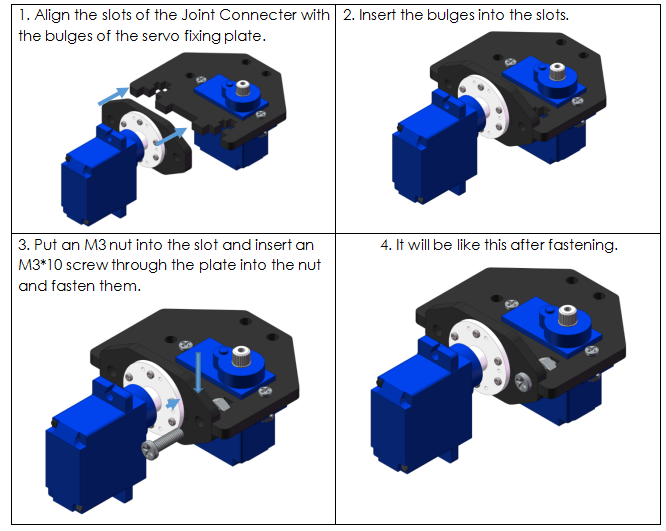
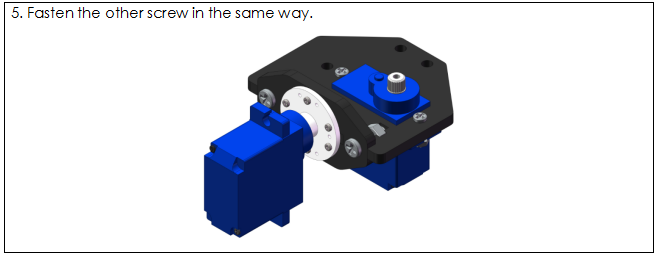
Servo +Servo Fixing Plate
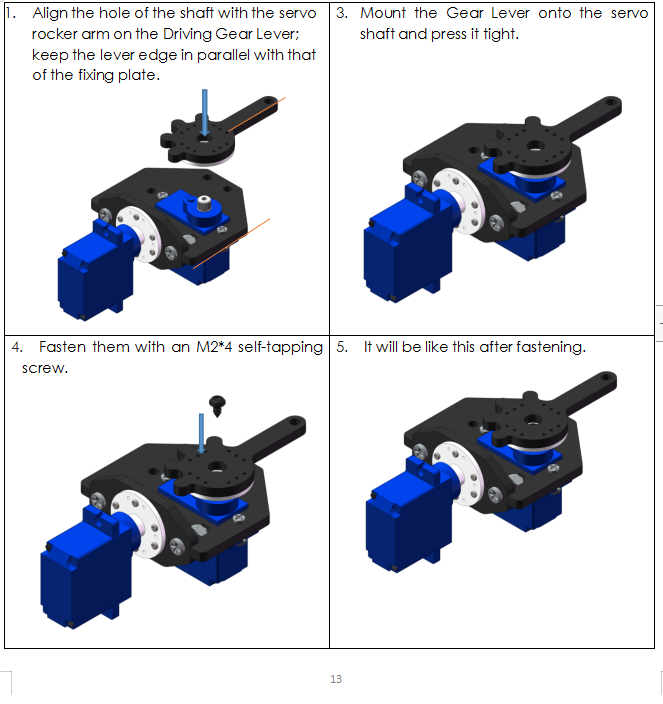
Joint Connecter/Driving Gear Lever + Servo Rocker Arm
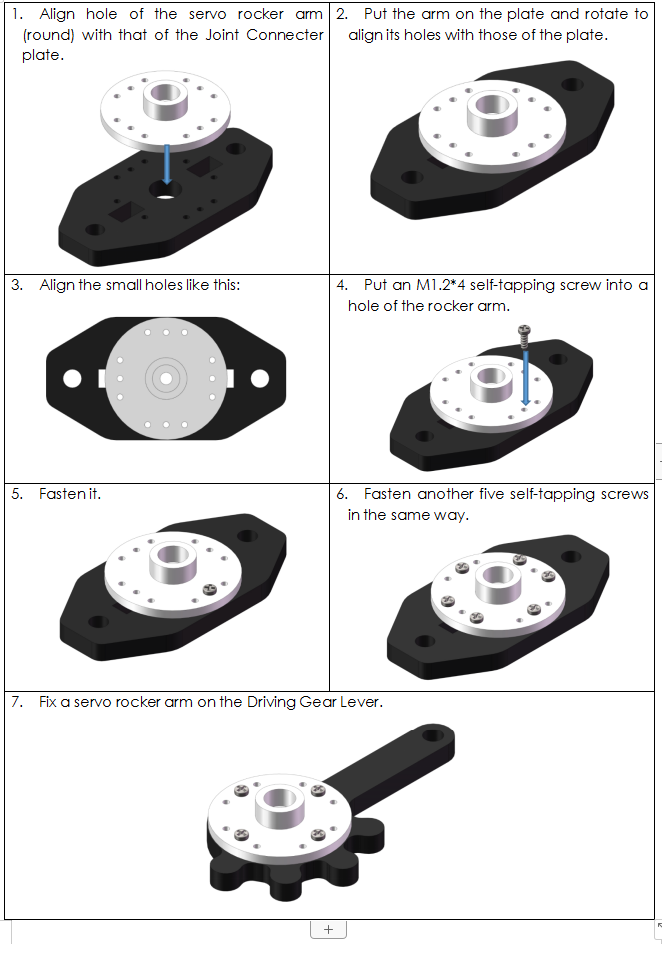
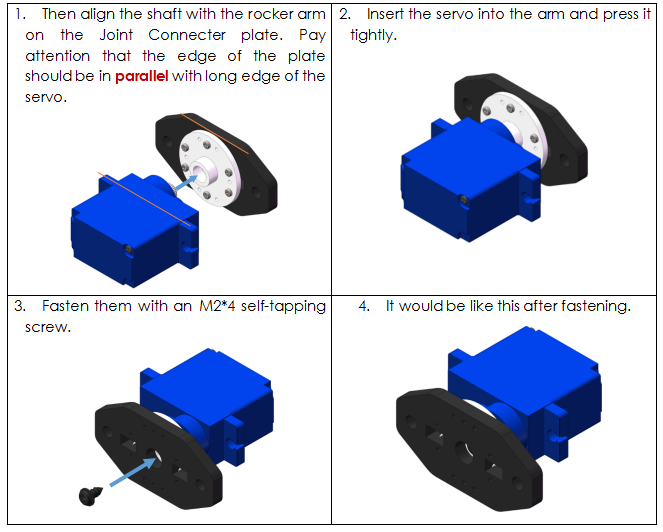
Servo + Servo Rocker Arm
Note: Before installing the rocker arms for each servo, you need to adjust the servo.
Step 1: Insert the servo wires into pin 4 and pin 5 of Arduino Uno board (or other board)
Step 2:Go to the folder Standard Gripper Kit-Rollpaw\Arduino Code\Servo and open the file Servo.ino.
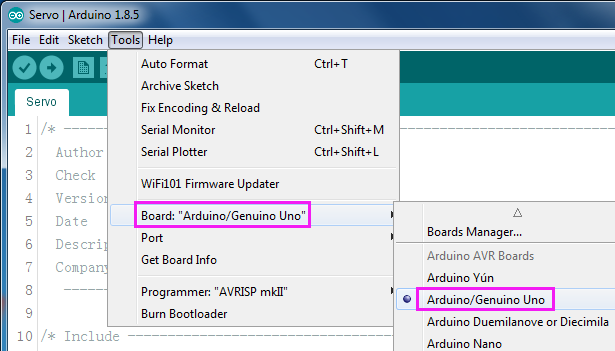
Step 3: Select the Board.
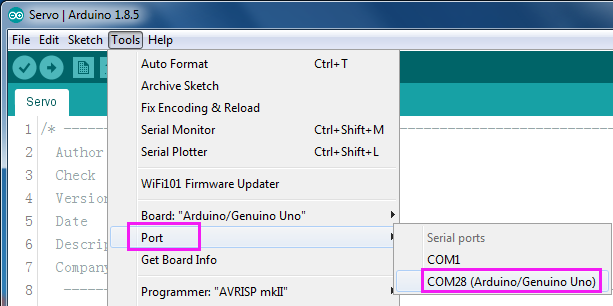
And Port.
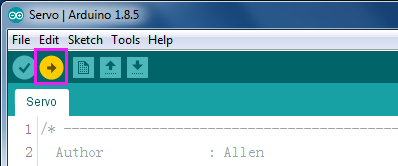
Step 5: Click Upload.
After the upload is completed successfully, unplug the USB cable and press the switch on the board. You may hear the sound of gear moving (or may not, if the servo shaft happens to be at 90 degrees at the beginning; but you GENTLY spin the rocker arm and you’ll find it’s unmovable). So now the servo is adjusted to 90 degrees.
Keep on the servos connect to the board and continue to assemble.
Servo 1 + Servo 2
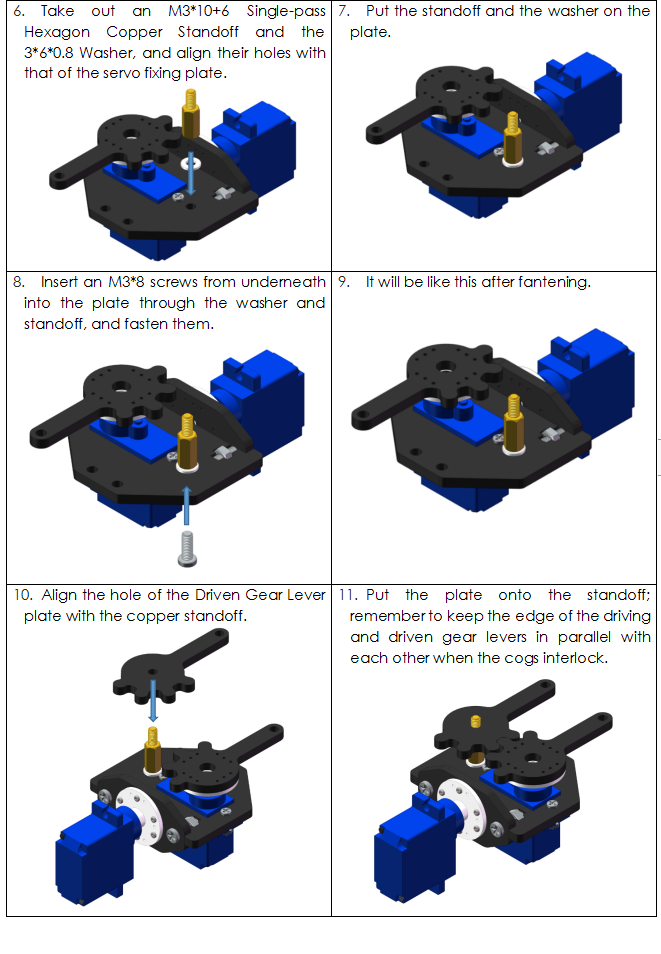
Servo + Fixing Plate + Driving/Driven Gear Lever
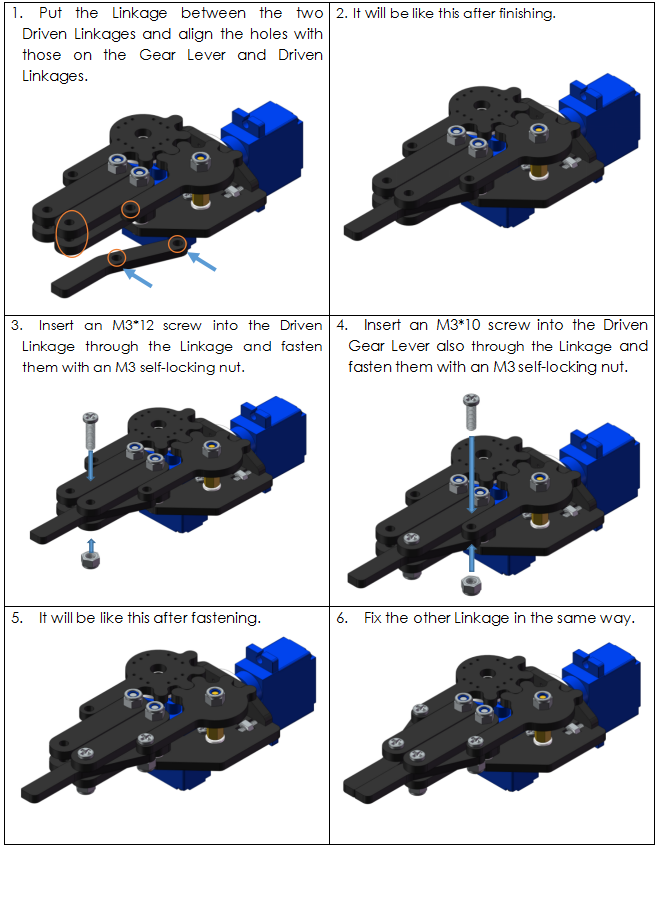
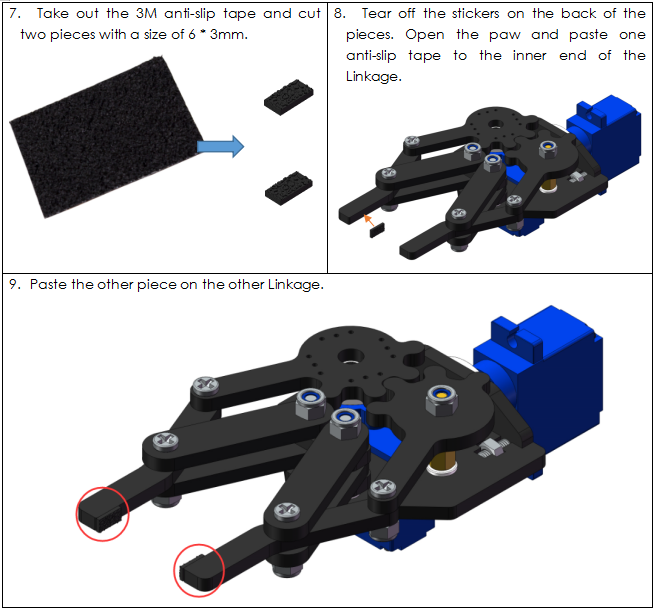
Lever + Driven Linkage
Linkage + Gear Lever/Driven Linkage