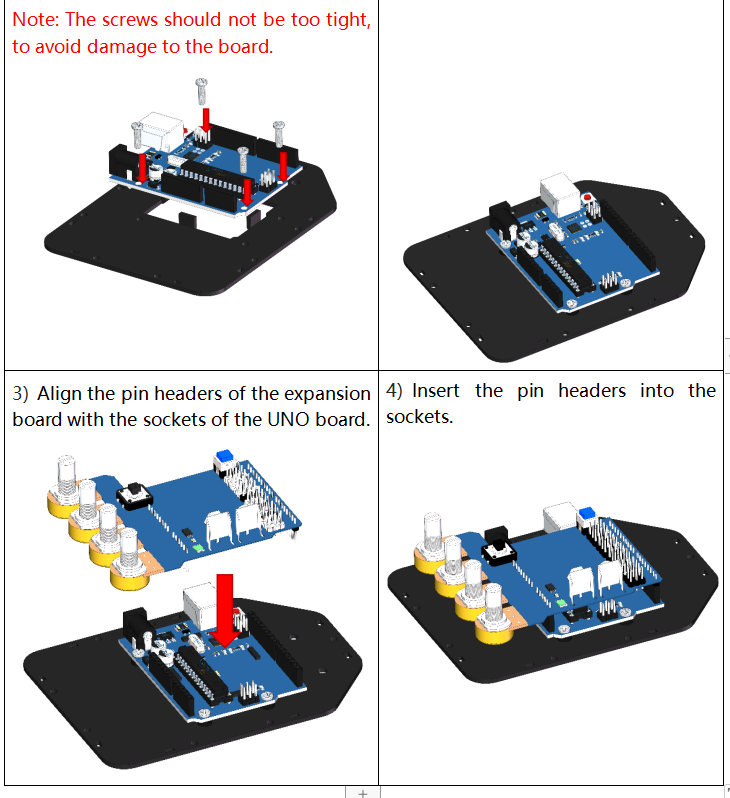
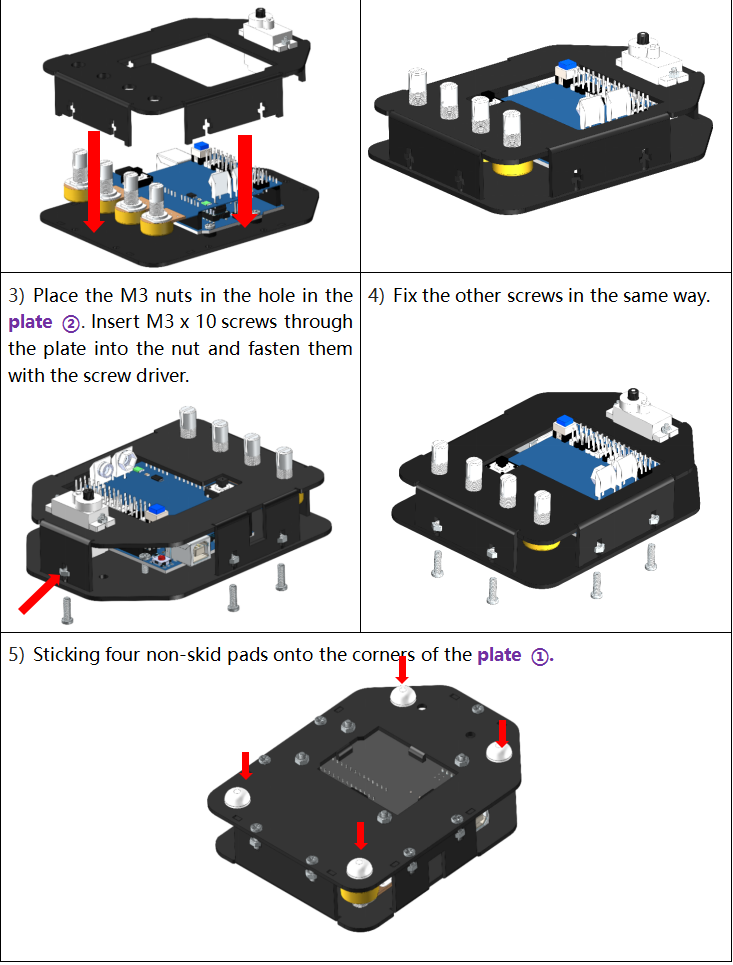
Base Bottom + Circuit Board
![]() Base Upper Plate + Servo
Base Upper Plate + Servo
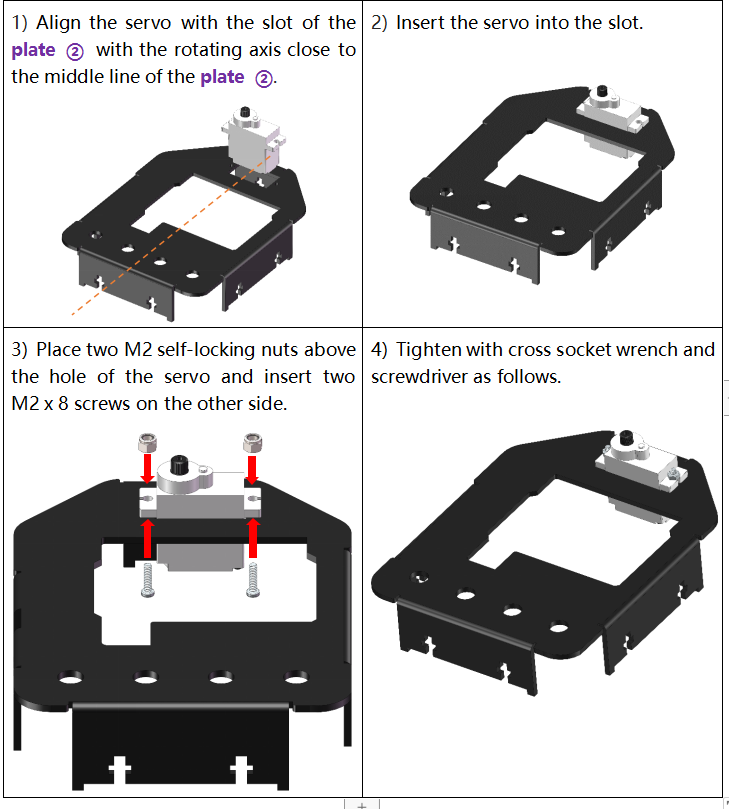
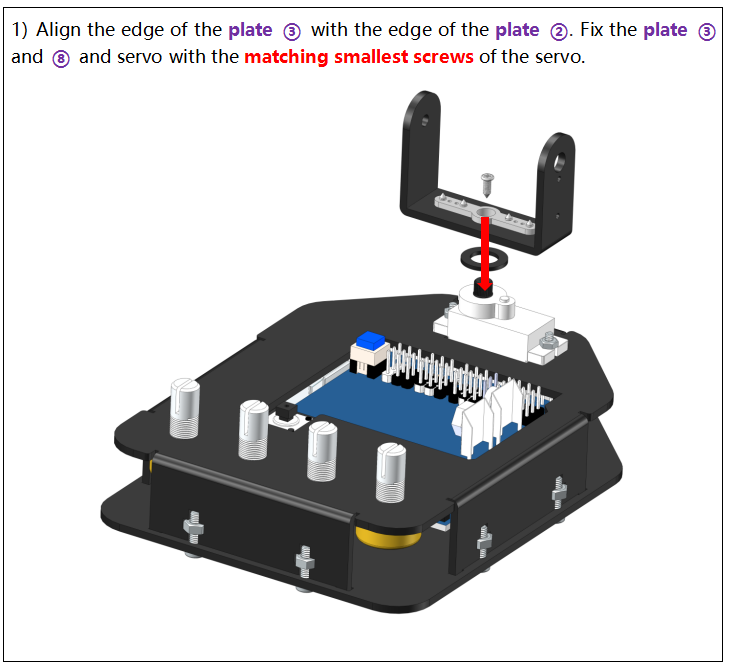
![]() Base Fixing Plate + Base Upper Plate
Base Fixing Plate + Base Upper Plate
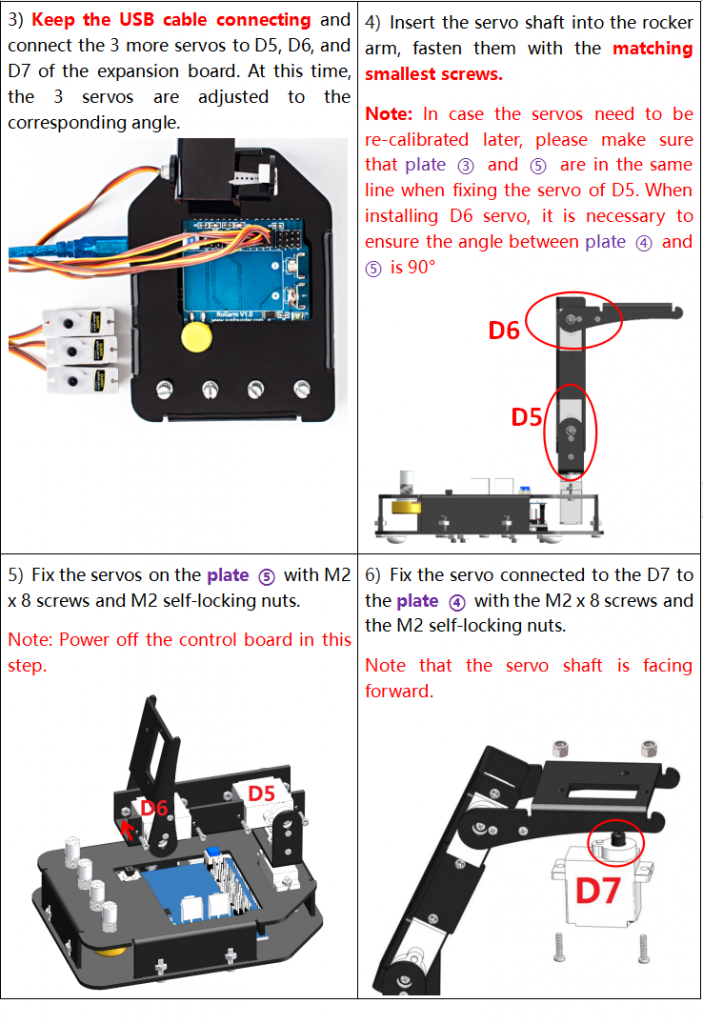
![]() Installing Servo Rocker Arm
Installing Servo Rocker Arm
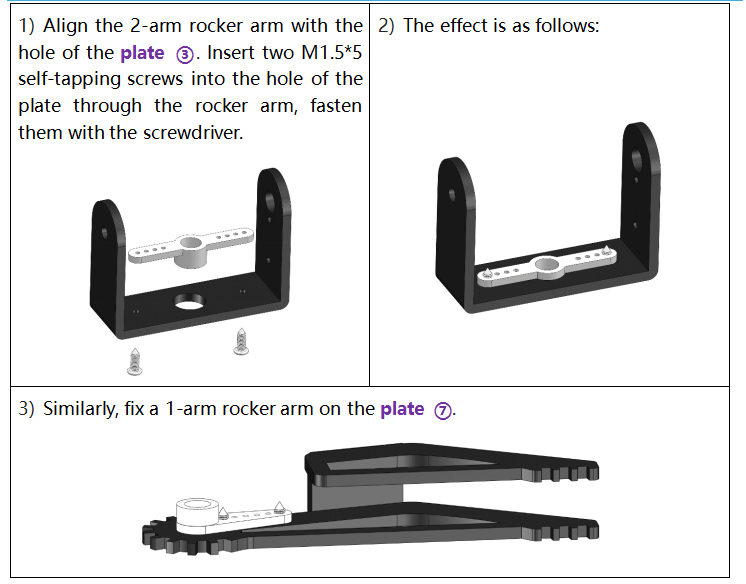
![]() Base + Joint 1 Connecting Plate
Base + Joint 1 Connecting Plate
Before installing the rocker arms for each servo, you need to adjust the servo. If you skip this step and finish assembling and power the product, the servo may appear to block or be damaged, you may even need to disassemble the robot from this step to reassemble it!
Step 1: Insert the servo wires into D4, connect the Servo Control Board to the PC via the USB cable, and the PC will automatically install the driver. The COM port connected will appear.
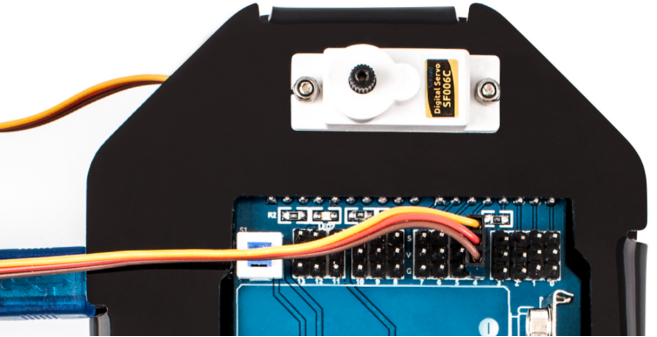
Connect the yellow, red, and brown wire to S, V, and G port as shown above.
Step 2: Connect the Rollarm to your computer with the Type-B cable: the driver will be installed automatically at that time, then you can see COMxx in device manager.

Step 3: Go to the folder DIY Control Robot Arm kit for Arduino-Rollarm/Arduino Code/Servo and open the file Servo.ino.
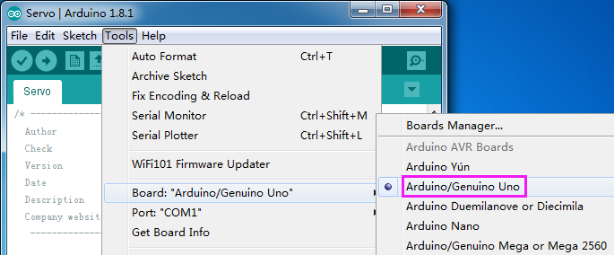
Step 4: Select the Board.
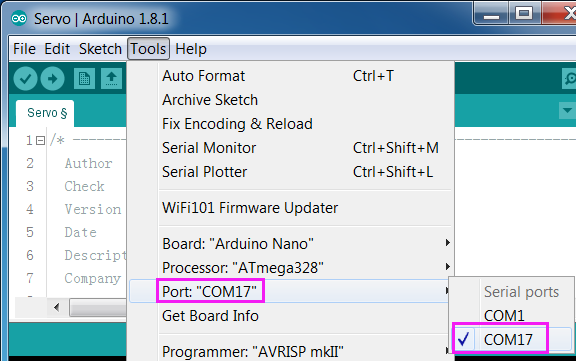
And Port
Step 5: Click Upload.
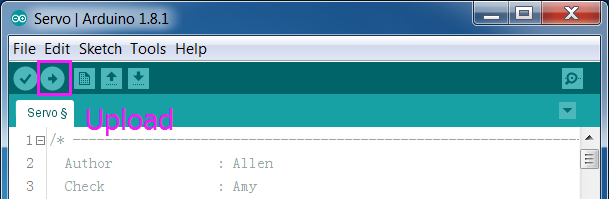
After the upload is completed successfully, keep the USB cable connecting. You may hear the sound of gear moving (or may not, if the servo shaft happens to be at 90 degrees at the beginning; but you GENTLY spin the rocker arm and you’ll find it’s unmovable). So now the servo is adjusted to 90 degrees.
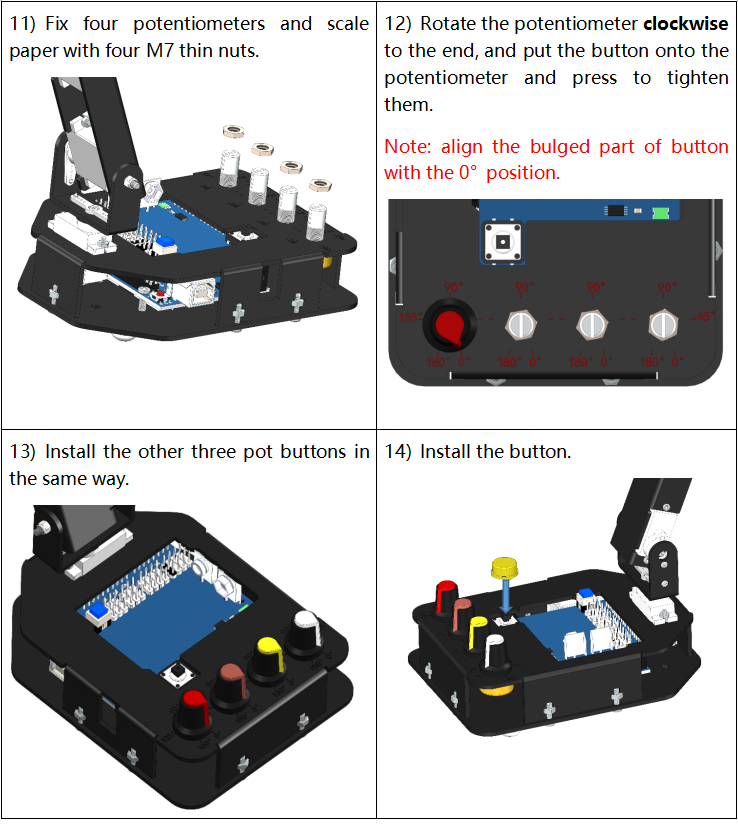
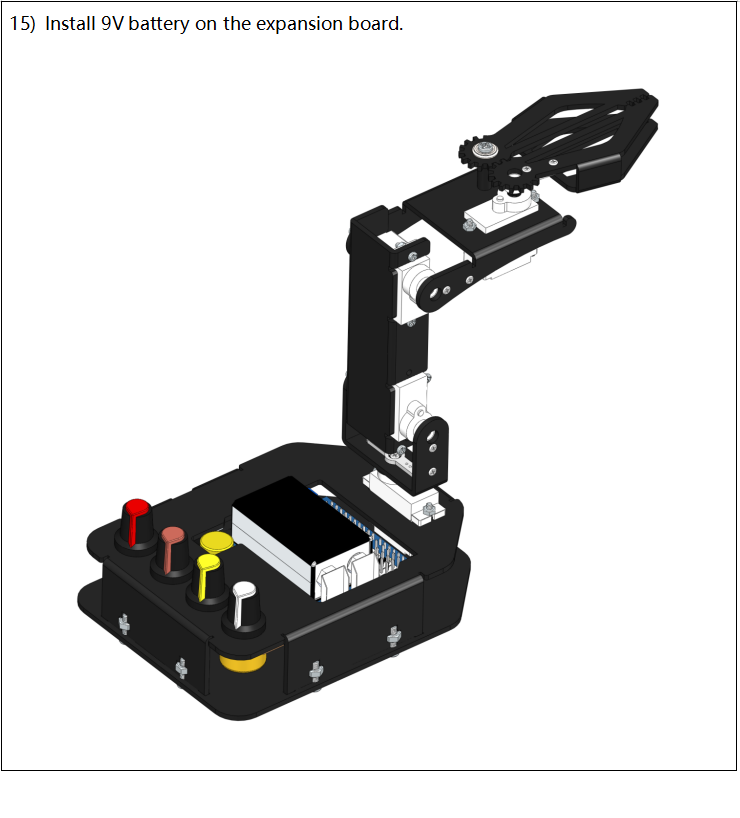
![]() Joint 1 + Joint 2 + Joint 3
Joint 1 + Joint 2 + Joint 3