Introduction
Buzzers can be categorized as active and passive ones (See the following picture).

Components
– 1 * Raspberry Pi
– 1 * Breadboard
– 1 * Network cable (or USB wireless network adapter)
– 1 * Passive buzzer module
– 1 * Active buzzer module
– 1 * 3-Pin anti-reverse cable
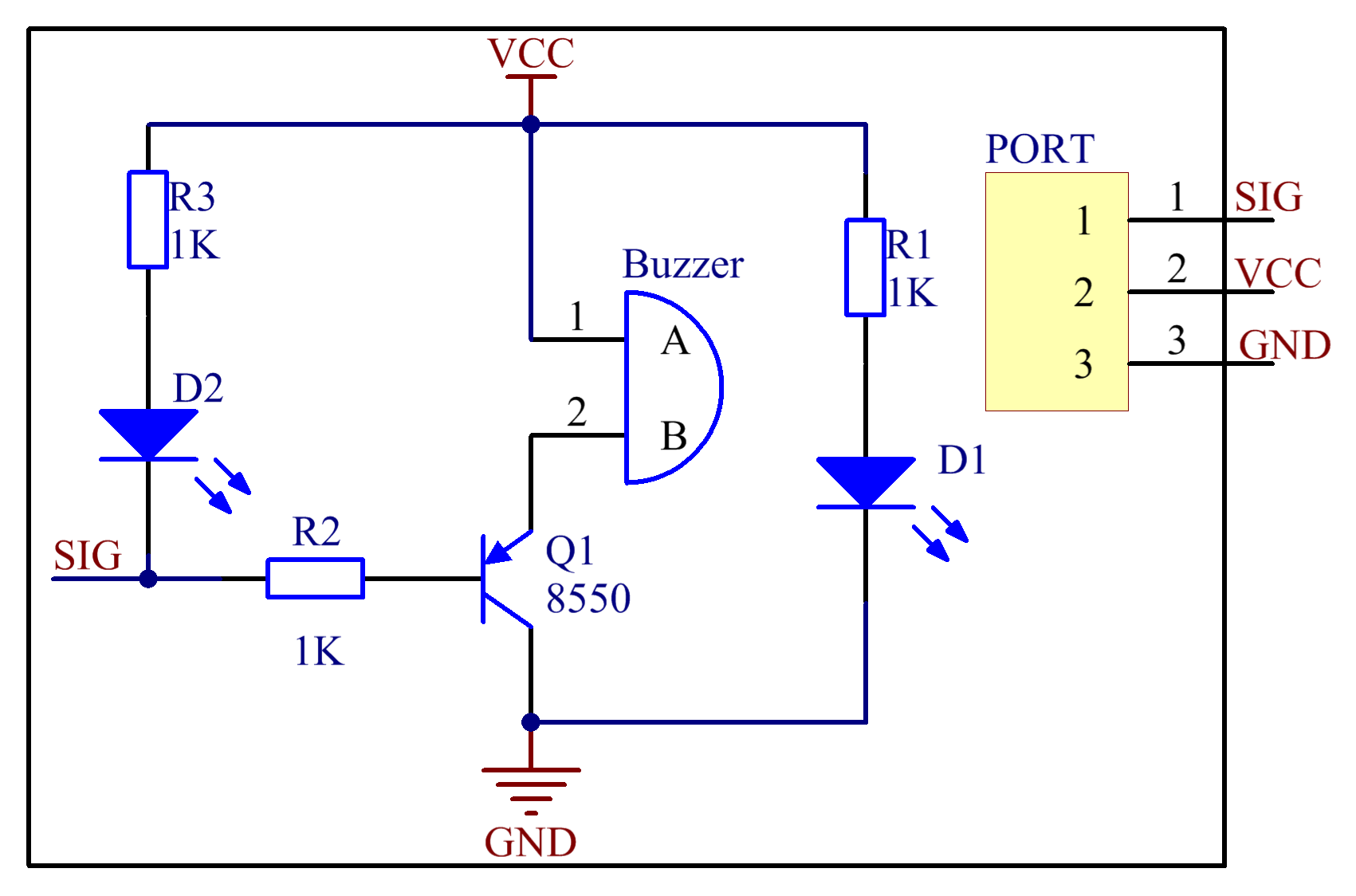
Experimental Principle
Place the pins of two buzzers face up and you can see the one with a green circuit board is a passive buzzer, while the other with a black tape, instead of a board, is an active buzzer, as shown below.

Active buzzer Passive buzzer
The difference between an active buzzer and a passive buzzer is:
An active buzzer has a built-in oscillating source, so it will make sounds when electrified. But a passive buzzer does not have such source, so it will not beep if DC signals are used; instead, you need to use square waves whose frequency is between 2K and 5K to drive it. The active buzzer is often more expensive than the passive one because of multiple built-in oscillating circuits.
Experimental Procedures
Active Buzzer
Note:
The active buzzer has built-in oscillating source, so it will beep as long as it is wired up, but it can only beep with fixed frequency.
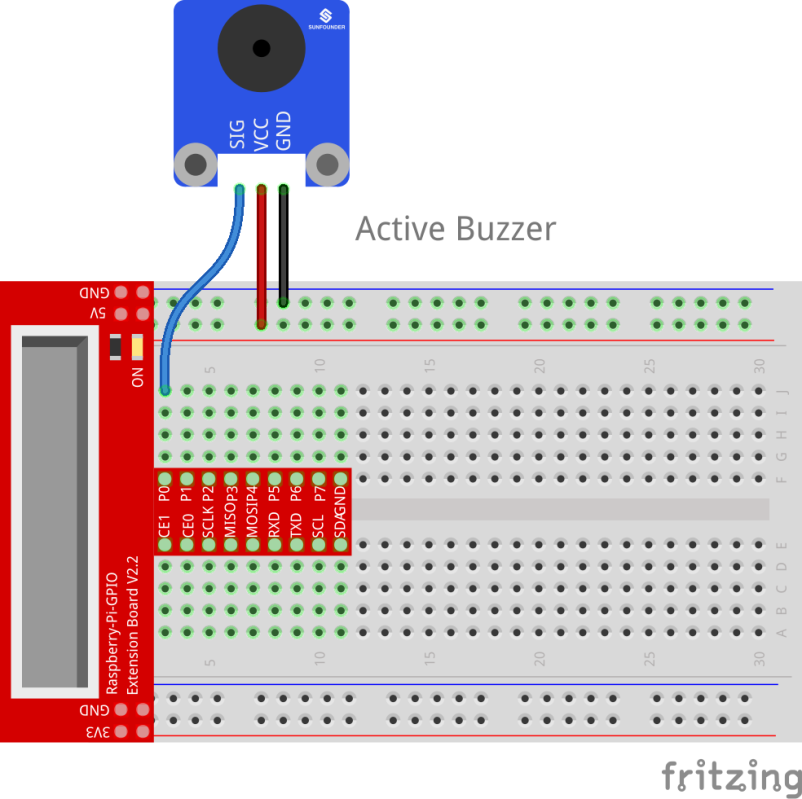
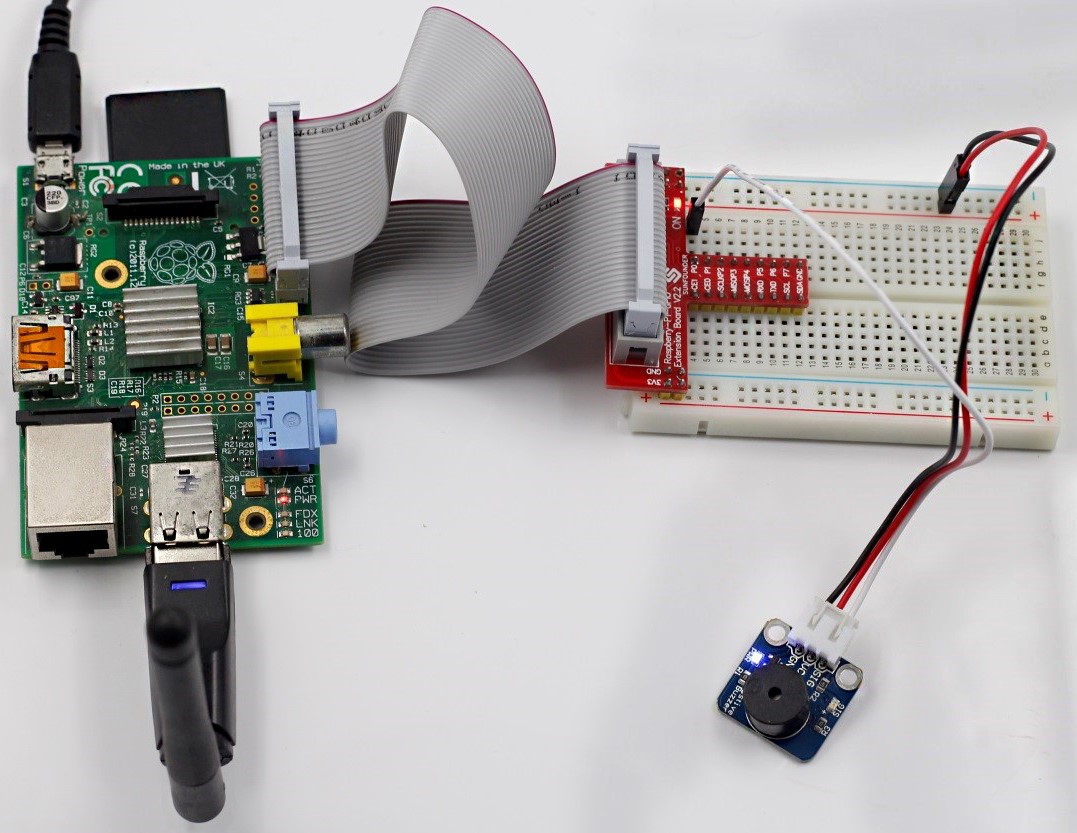
Step 1: Build the circuit
| Raspberry Pi | Active Buzzer Module |
| GPIO0 | SIG |
| 5V | VCC |
| GND | GND |
For C language users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/C/10_active_buzzer/
Step 3: Compile
gcc active_buzzer.c –lwiringPi
Step 4: Run
sudo ./a.out
For Python users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/Python/
Step 3: Run
sudo python 10_active_buzzer.py
Now you can hear the active buzzer beeping.
Passive Buzzer
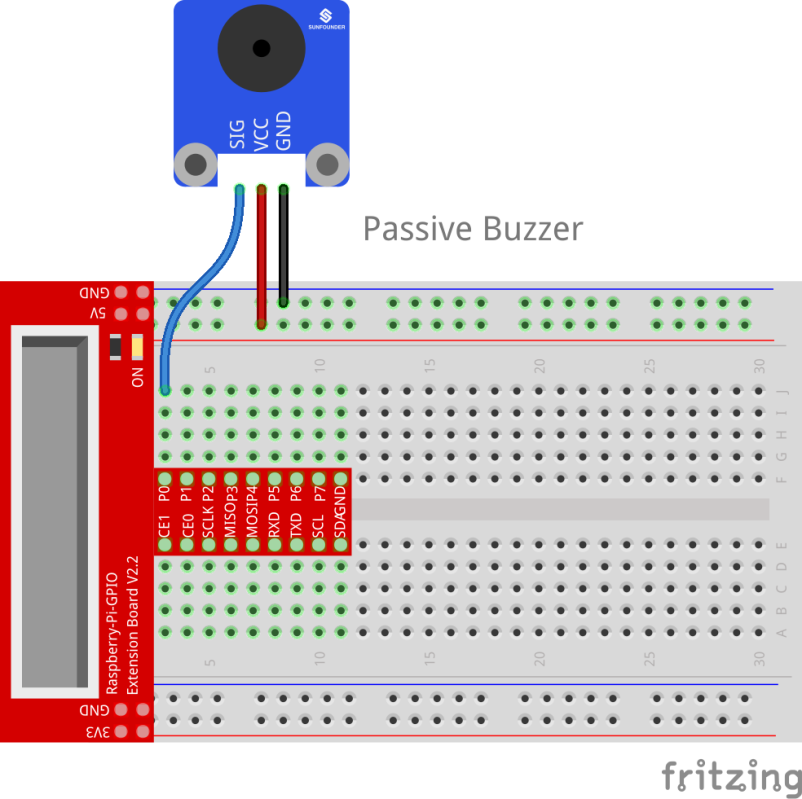
Step 1: Build the circuit
| Raspberry Pi | Passive Buzzer Module |
| GPIO0 | SIG |
| 5V | VCC |
| GND | GND |
For C language users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/C/10_passive_buzzer/
Step 3: Compile
gcc passive_buzzer.c –lwiringPi
Step 4: Run
sudo ./a.out
For Python users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/Python/
Step 3: Run
sudo python 10_passive_buzzer.py
Now you can hear the passive buzzer playing music.
C Code
Active Buzzer
#include
#include
#define BuzzerPin 0
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
// printf("linker LedPin : GPIO %d(wiringPi pin)\n",VoicePin); //when initialize wiring successfully,print message to screen
pinMode(BuzzerPin, OUTPUT);
while(1){
digitalWrite(BuzzerPin, HIGH);
delay(100);
digitalWrite(BuzzerPin, LOW);
delay(100);
}
return 0;
}
Passive Buzzer
#include
#include
#include
#define BuzPin 0
#define CL1 131
#define CL2 147
#define CL3 165
#define CL4 175
#define CL5 196
#define CL6 221
#define CL7 248
#define CM1 262
#define CM2 294
#define CM3 330
#define CM4 350
#define CM5 393
#define CM6 441
#define CM7 495
#define CH1 525
#define CH2 589
#define CH3 661
#define CH4 700
#define CH5 786
#define CH6 882
#define CH7 990
int song_1[] = {CM3,CM5,CM6,CM3,CM2,CM3,CM5,CM6,CH1,CM6,CM5,CM1,CM3,CM2,
CM2,CM3,CM5,CM2,CM3,CM3,CL6,CL6,CL6,CM1,CM2,CM3,CM2,CL7,
CL6,CM1,CL5};
int beat_1[] = {1,1,3,1,1,3,1,1,1,1,1,1,1,1,3,1,1,3,1,1,1,1,1,1,1,2,1,1,
1,1,1,1,1,1,3};
int song_2[] = {CM1,CM1,CM1,CL5,CM3,CM3,CM3,CM1,CM1,CM3,CM5,CM5,CM4,CM3,CM2,
CM2,CM3,CM4,CM4,CM3,CM2,CM3,CM1,CM1,CM3,CM2,CL5,CL7,CM2,CM1
};
int beat_2[] = {1,1,1,3,1,1,1,3,1,1,1,1,1,1,3,1,1,1,2,1,1,1,3,1,1,1,3,3,2,3};
int main(void)
{
int i, j;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
if(softToneCreate(BuzPin) == -1){
printf("setup softTone failed !");
return 1;
}
while(1){
printf("music is being played...\n");
for(i=0;i<sizeof(song_1) 4;i++){="" softtonewrite(buzpin,="" song_1[i]);="" delay(beat_1[i]="" *="" 500);="" }="" for(i="0;i<sizeof(song_2)/4;i++){" song_2[i]);="" delay(beat_2[i]="" return="" 0;="" <="" pre="">
</sizeof(song_1)>
Python Code
Acitve Buzzer
#!/usr/bin/env python
import RPi.GPIO as GPIO
import time
Buzzer = 11 # pin11
def setup(pin):
global BuzzerPin
BuzzerPin = pin
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(BuzzerPin, GPIO.OUT)
GPIO.output(BuzzerPin, GPIO.HIGH)
def on():
GPIO.output(BuzzerPin, GPIO.LOW)
def off():
GPIO.output(BuzzerPin, GPIO.HIGH)
def beep(x):
on()
time.sleep(x)
off()
time.sleep(x)
def loop():
while True:
beep(0.5)
def destroy():
GPIO.output(BuzzerPin, GPIO.HIGH)
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup(Buzzer)
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()
Passive Buzzer
#!/usr/bin/env python
#---------------------------------------------------
#
# This is a program for Passive Buzzer Module
# It will play simple songs.
# You could try to make songs by youselves!
#
# Passive buzzer Pi
# VCC ----------------- 3.3V
# GND ------------------ GND
# SIG ---------------- Pin 11
#
#---------------------------------------------------
import RPi.GPIO as GPIO
import time
Buzzer = 11
CL = [0, 131, 147, 165, 175, 196, 211, 248] # Frequency of Low C notes
CM = [0, 262, 294, 330, 350, 393, 441, 495] # Frequency of Middle C notes
CH = [0, 525, 589, 661, 700, 786, 882, 990] # Frequency of High C notes
song_1 = [ CM[3], CM[5], CM[6], CM[3], CM[2], CM[3], CM[5], CM[6], # Notes of song1
CH[1], CM[6], CM[5], CM[1], CM[3], CM[2], CM[2], CM[3],
CM[5], CM[2], CM[3], CM[3], CL[6], CL[6], CL[6], CM[1],
CM[2], CM[3], CM[2], CL[7], CL[6], CM[1], CL[5] ]
beat_1 = [ 1, 1, 3, 1, 1, 3, 1, 1, # Beats of song 1, 1 means 1/8 beats
1, 1, 1, 1, 1, 1, 3, 1,
1, 3, 1, 1, 1, 1, 1, 1,
1, 2, 1, 1, 1, 1, 1, 1,
1, 1, 3 ]
song_2 = [ CM[1], CM[1], CM[1], CL[5], CM[3], CM[3], CM[3], CM[1], # Notes of song2
CM[1], CM[3], CM[5], CM[5], CM[4], CM[3], CM[2], CM[2],
CM[3], CM[4], CM[4], CM[3], CM[2], CM[3], CM[1], CM[1],
CM[3], CM[2], CL[5], CL[7], CM[2], CM[1] ]
beat_2 = [ 1, 1, 2, 2, 1, 1, 2, 2, # Beats of song 2, 1 means 1/8 beats
1, 1, 2, 2, 1, 1, 3, 1,
1, 2, 2, 1, 1, 2, 2, 1,
1, 2, 2, 1, 1, 3 ]
def setup():
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(Buzzer, GPIO.OUT) # Set pins' mode is output
global Buzz # Assign a global variable to replace GPIO.PWM
Buzz = GPIO.PWM(Buzzer, 440) # 440 is initial frequency.
Buzz.start(50) # Start Buzzer pin with 50% duty ration
def loop():
while True:
print '\n Playing song 1...'
for i in range(1, len(song_1)): # Play song 1
Buzz.ChangeFrequency(song_1[i]) # Change the frequency along the song note
time.sleep(beat_1[i] * 0.5) # delay a note for beat * 0.5s
time.sleep(1) # Wait a second for next song.
print '\n\n Playing song 2...'
for i in range(1, len(song_2)): # Play song 1
Buzz.ChangeFrequency(song_2[i]) # Change the frequency along the song note
time.sleep(beat_2[i] * 0.5) # delay a note for beat * 0.5s
def destory():
Buzz.stop() # Stop the buzzer
GPIO.output(Buzzer, 1) # Set Buzzer pin to High
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destory()