Introduction
The ultrasonic sensor is used to sense distance from objects.
Components
– 1 * SunFounder Uno board
– 1 * USB data cable
– 1 * Breadboard
– 1 * Ultrasonic sensor
– 1 * LCD1602
– 1 * Potentiometer
– Several jumper wires
Experimental Principle
This sensor works by sending a sound wave out and calculating the time it takes for the sound wave to get back to the ultrasonic sensor. By doing this, it can tell us how far away objects are relative to the ultrasonic sensor.
Experimental Procedures
Step 1: Build the circuit
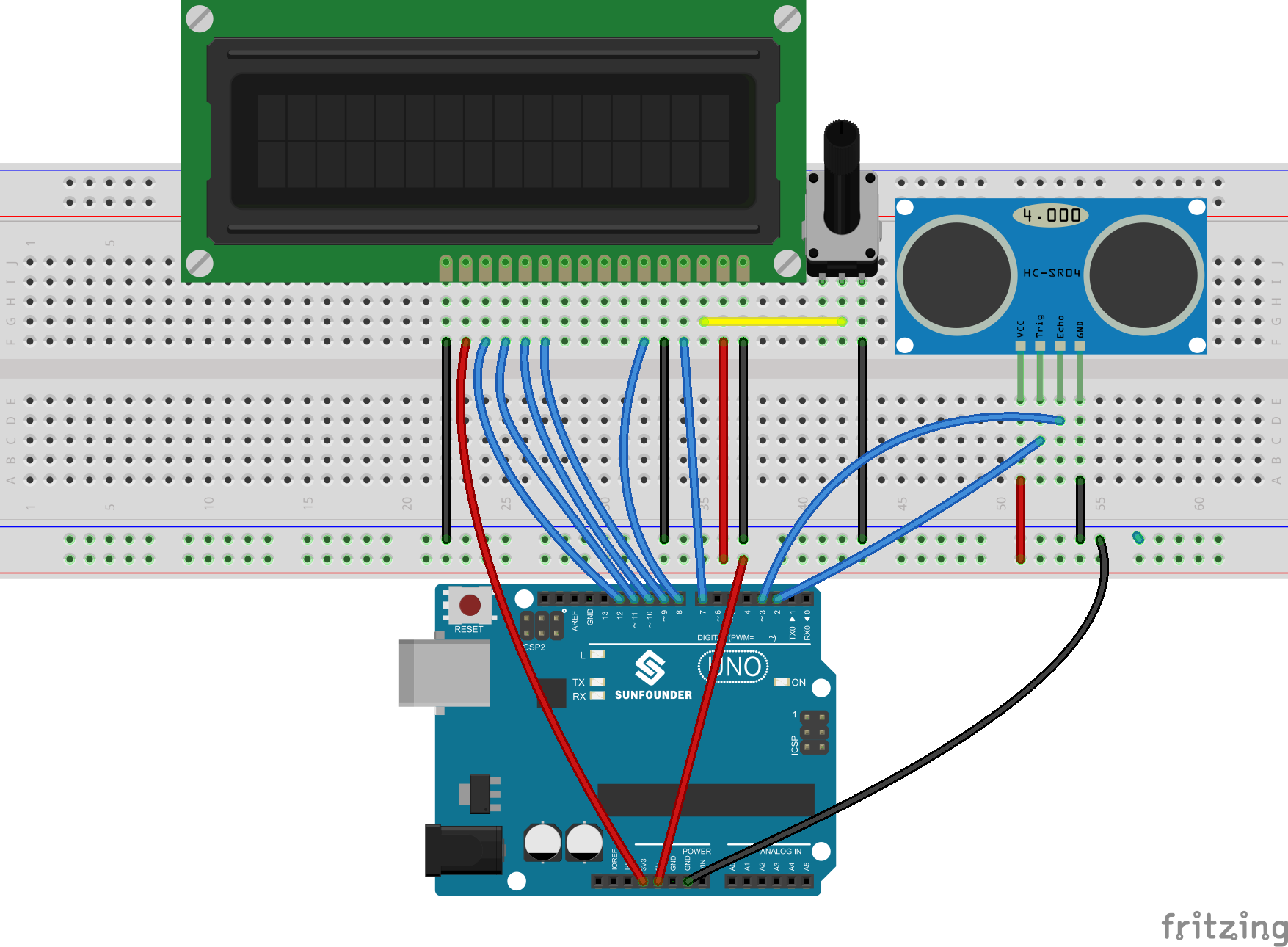
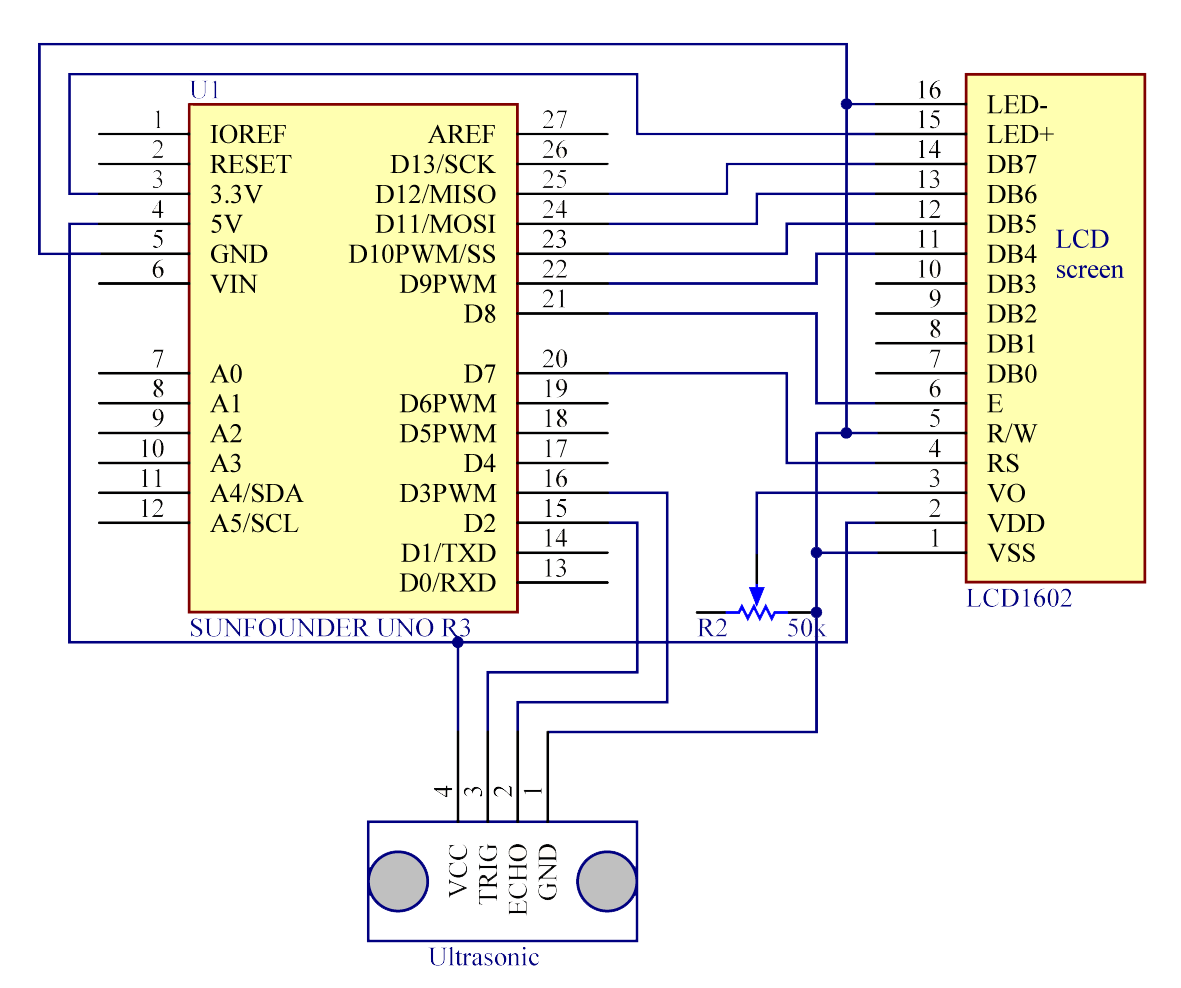
The schematic diagram
Step 2: Program (Please refer to the example code in LEARN -> Get Tutorials on our website)
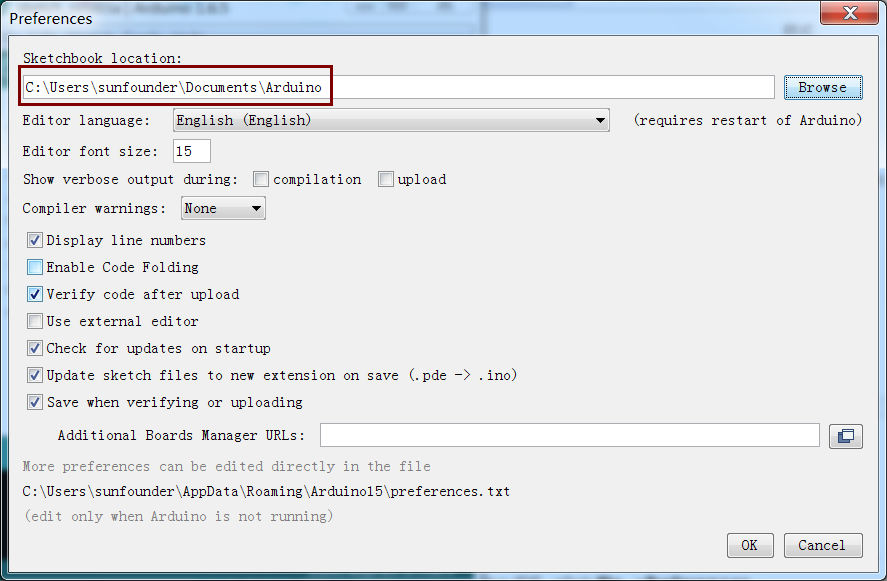
Step 3:Since in some code, the libraries needed are not included in Arduino, so you need to add them before compiling. Unzip the downloaded file. Copy the folders under the Library folder to the libraries folder in Arduino (if you cannot find the path in Arduino, open Arduino IDE, click File ->Preferences, and you can see the path in the Browse box, as shown in the following diagram). Compile the code
Step 4: Upload the sketch to the SunFounder Uno board
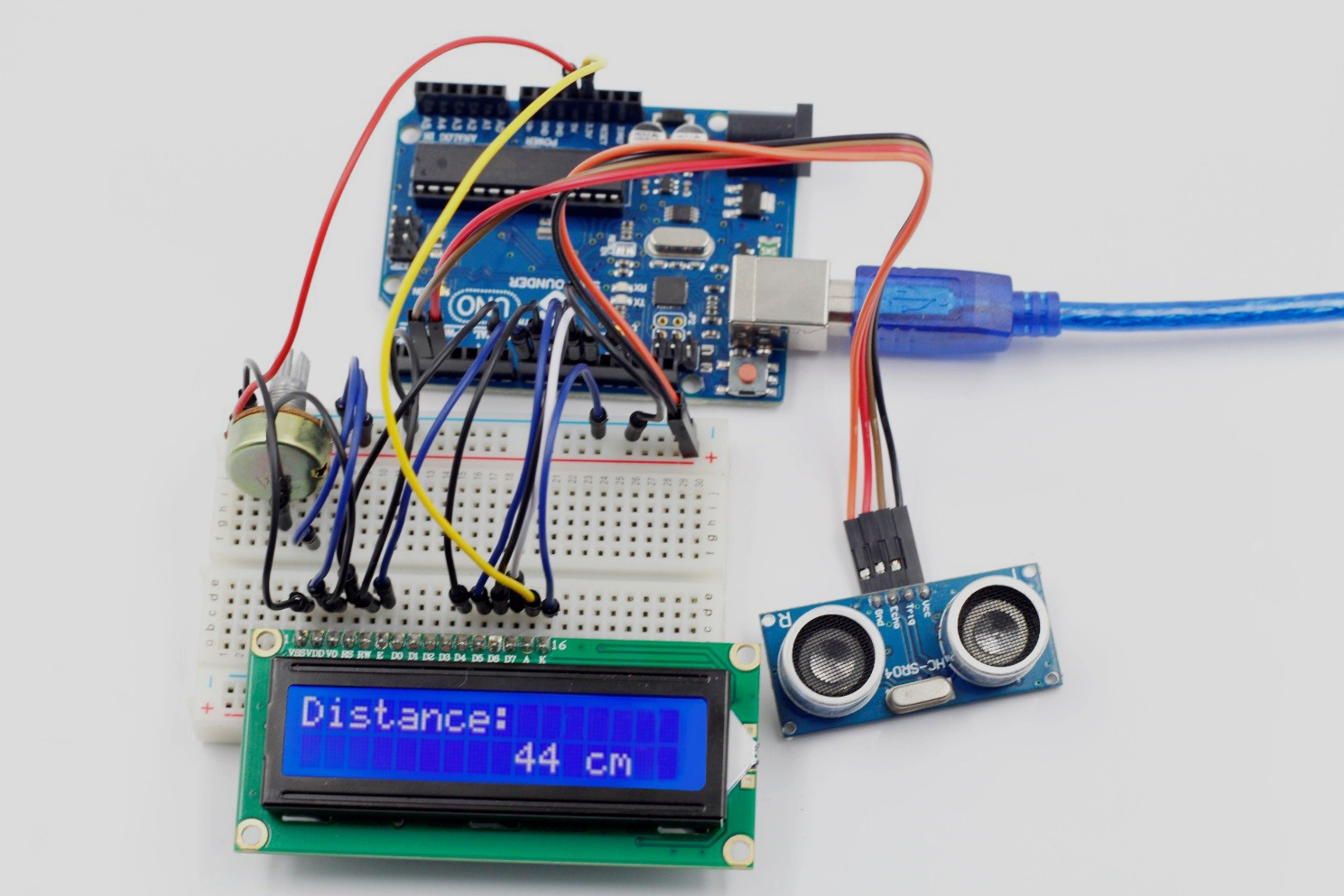
Now, if you use a piece of paper to approach or keep it far away from the sensor. You will see the value displayed on the LCD changes, which indicates the distance between the paper and the ultrasonic sensor.
Code
| /************************************************ * name:Ultrasonic * function: if you use a piece of paper to approach or keep it far away from the sensor. * You will see the value displayed on the LCD changes, * which indicates the distance between the paper and the ultrasonic sensor. *****************************************/ //Email: support@sunfounder.com //Website: www.sunfounder.com/**********************************/ #include <LiquidCrystal.h> #include <NewPing.h>LiquidCrystal lcd(7, 8, 9, 10, 11, 12);//lcd(RS,E,D4,D5,D6,D7)#define TRIGGER_PIN 2 // trig pin on the ultrasonic sensor attach to pin2 . #define ECHO_PIN 3 // echo pin on the ultrasonic sensor attach to pin3. #define MAX_DISTANCE 400 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.void setup() { Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results. lcd.begin(16, 2); //// set the position of the characters on the LCD as Line 2, Column 16 }void loop() { delay(100); // Wait 100ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings. unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS). Serial.print(“Ping: “);//print”Ping: “ Serial.print(uS / US_ROUNDTRIP_CM); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println(“cm”);//print”cm” lcd.setCursor(0, 0);//Place the cursor at Line 1, Column 1. From here the characters are to be displayed lcd.print(“Distance:”);////Print Distance: on the LCD lcd.setCursor(0, 1);//Set the cursor at Line 1, Column 0 lcd.print(” “);//Here is to leave some spaces after the characters so as to clear the previous characters that may still remain. lcd.setCursor(9, 1);//Set the cursor at Line 1, Column 9. lcd.print(uS / US_ROUNDTRIP_CM);// print on the LCD the value of the distance converted from the time between ping sending and receiving. lcd.setCursor(12, 1);//Set the cursor at Line 1, Column 12. lcd.print(“cm”);//print the unit “cm” } |
Video