Introduction
The tilt switch sensor module is a ball tilt switch with a metal ball inside. It is used to detect inclinations of a small angle.
Components
– 1 * Raspberry Pi
– 1 * Breadboard
– 1 * Network cable (or USB wireless network adapter)
– 1 * Dual-color Common-Cathode LED module
– 1 * Tilt-switch module
– Several jumper wires
Experimental Principle
The principle is very simple: the ball in the tilt switch moves with different angles of inclination to make triggering circuits. When it tilts towards either side, as long as the tilt degree and force meet the condition, the switch will be energized; thus, it will output low level signals.
Experimental Procedures
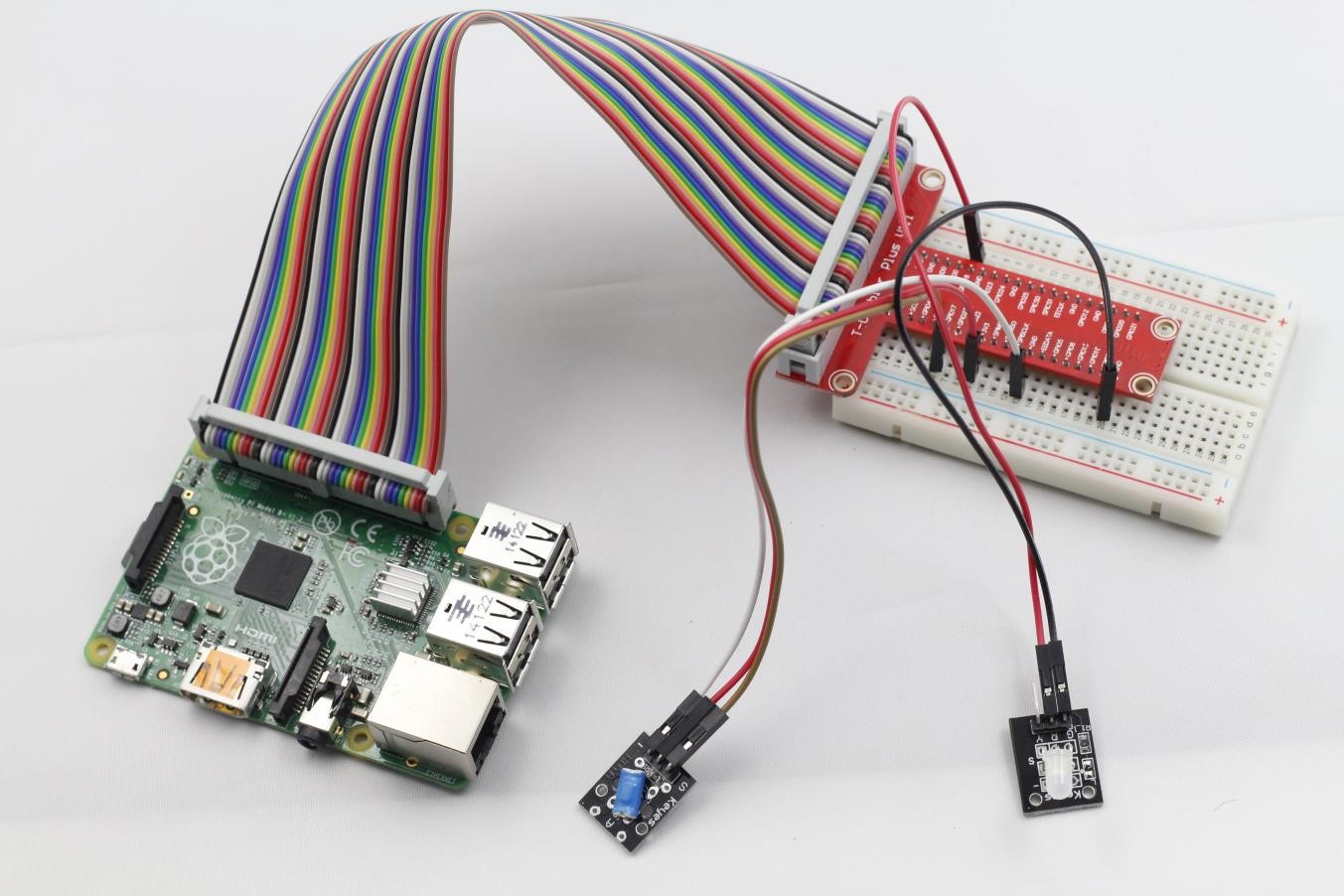
Step 1: Build the circuit
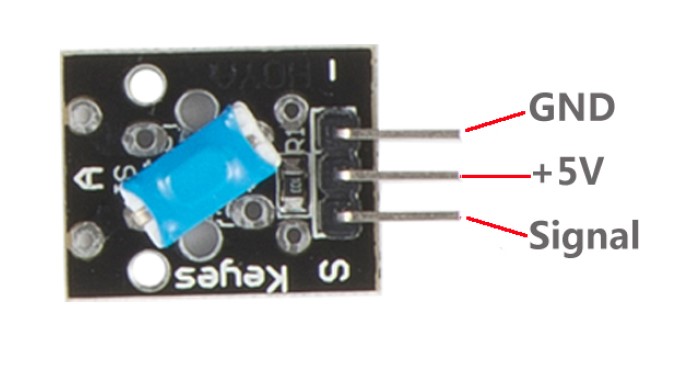
Tilt-Switch Raspberry Pi
S —————————— GPIO0
+ ——————————- 3.3V
– ——————————– GND
Dual-color LED module connection: connect pin R on dual-color LED module to GPIO1 on Raspberry Pi; GND to GND
Step 2: Edit and save the code (see path/Rpi_SensorKit_code/15_tiltSwitch/tiltSwitch.c)
Step 3: Compile
gcc tiltSwitch.c -lwiringPi
Step 4: Run
./a.out
Tilt the switch and the state of LED will be switched ON/OFF.
tiltSwitch.c
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h>
#include <wiringPi.h>
#define TiltPin 0
#define LedPin 1
int main(void)
{
if(wiringPiSetup() < 0){
fprintf(stderr, "Unable to setup wiringPi:%s\n",strerror(errno));
return 1;
}
pinMode(TiltPin, INPUT);
pinMode(LedPin, OUTPUT);
while(1){
if(0 == digitalRead(TiltPin)){
digitalWrite(LedPin, LOW);
}
else{
digitalWrite(LedPin, HIGH);
}
}
return 0;
}Python Code
#!/usr/bin/env python
import RPi.GPIO as GPIO
TiltPin = 11
LedPin = 12
Led_status = 1
def setup():
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(LedPin, GPIO.OUT) # Set LedPin's mode is output
GPIO.setup(TiltPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.output(LedPin, GPIO.LOW) # Set LedPin high(+3.3V) to off led
def swLed(ev=None):
global Led_status
Led_status = not Led_status
GPIO.output(LedPin, Led_status) # switch led status(on-->off; off-->on)
print "LED: off" if Led_status else "LED: on"
def loop():
GPIO.add_event_detect(TiltPin, GPIO.FALLING, callback=swLed, bouncetime=100) # wait for falling
while True:
pass # Don't do anything
def destroy():
GPIO.output(LedPin, GPIO.LOW) # led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()