Introduction
In this lesson, we will use an ultrasonic sensor and some other components to simulate how to back a car.
Components
– 1 * SunFounder Uno board
– 1 * USB data cable
– 1 * Ultrasonic sensor
– 1 * Buzzer
– 1 * LCD1602
– Several jumper wires
– 1 * Breadboard
– 1 * Potentiometer
Experimental Principle
When the distance between the ultrasonic and the obstacle is greater than 5cm and less than 15cm, the buzzer will beep in a low frequency, which means backing a car is in progress. When the distance is less than 5cm, the buzzer will beep in a high frequency.
Experimental Procedures
Step 1: Build the circuit
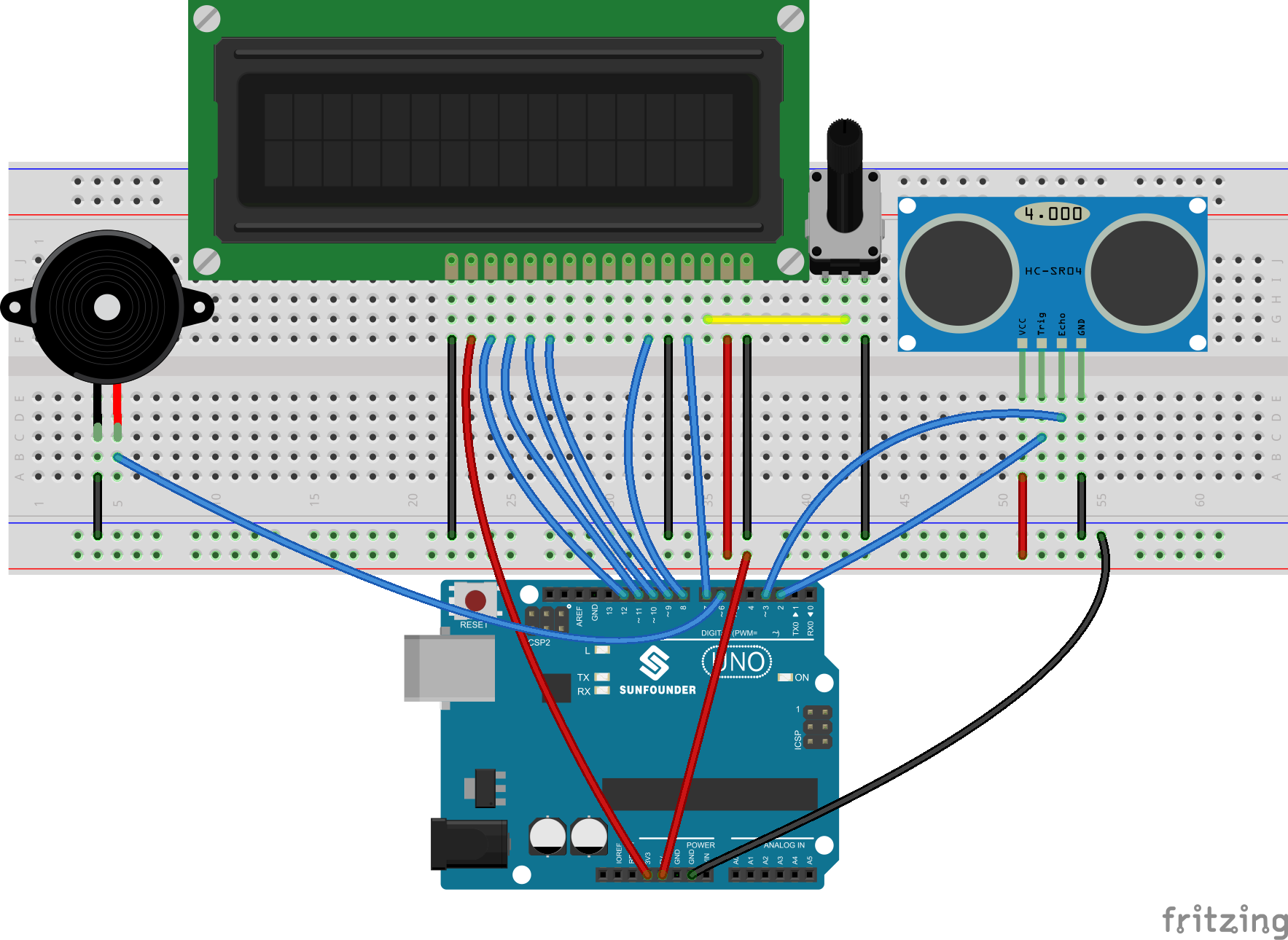
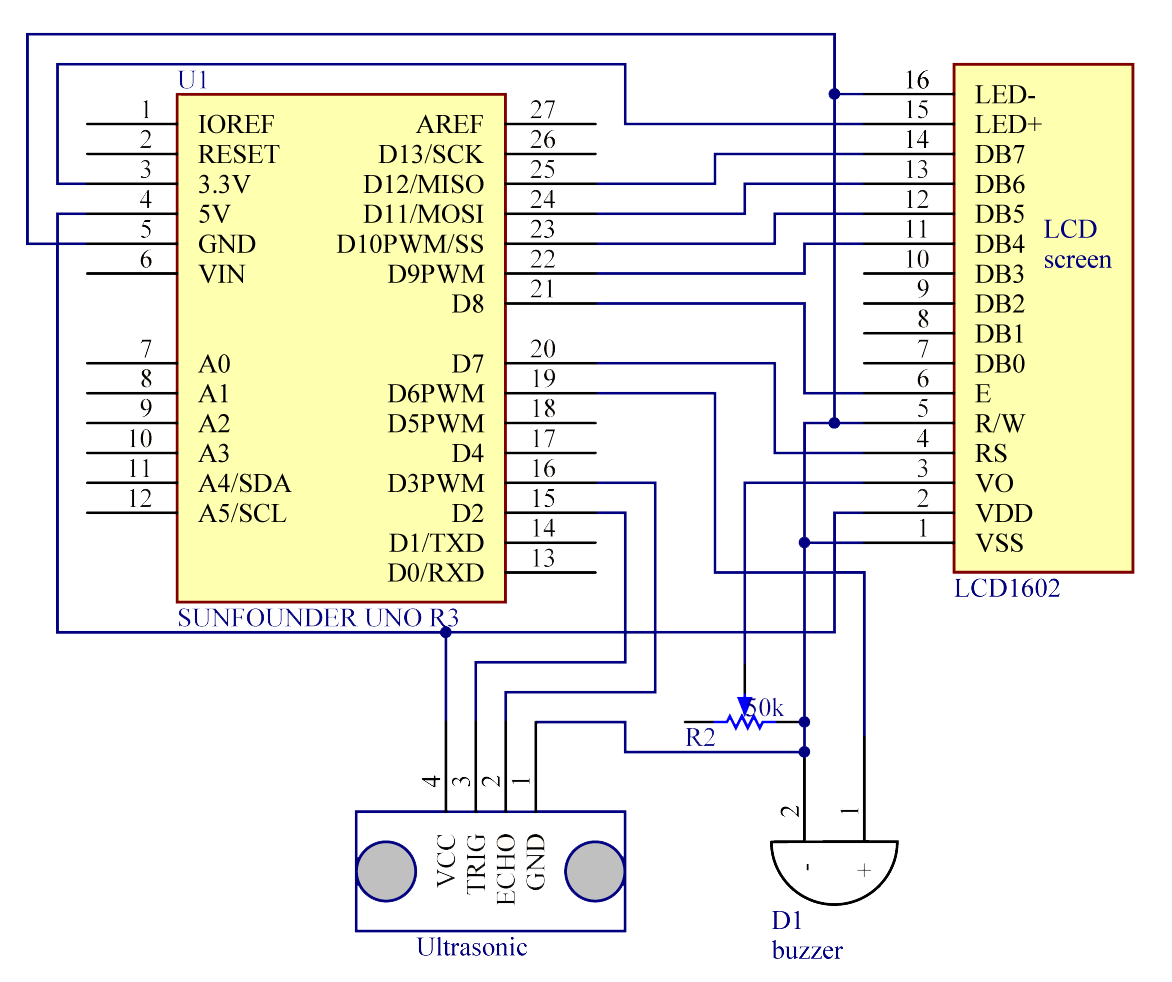
The schematic diagram
Step 2: Program (Please refer to the example code in LEARN -> Get Tutorials on our website)
Note: Here you need to add a library. Refer to the description in Lesson 12 previously in the manual.
Step 3: Compile the code
Step 4: Upload the sketch to the SunFounder Uno board
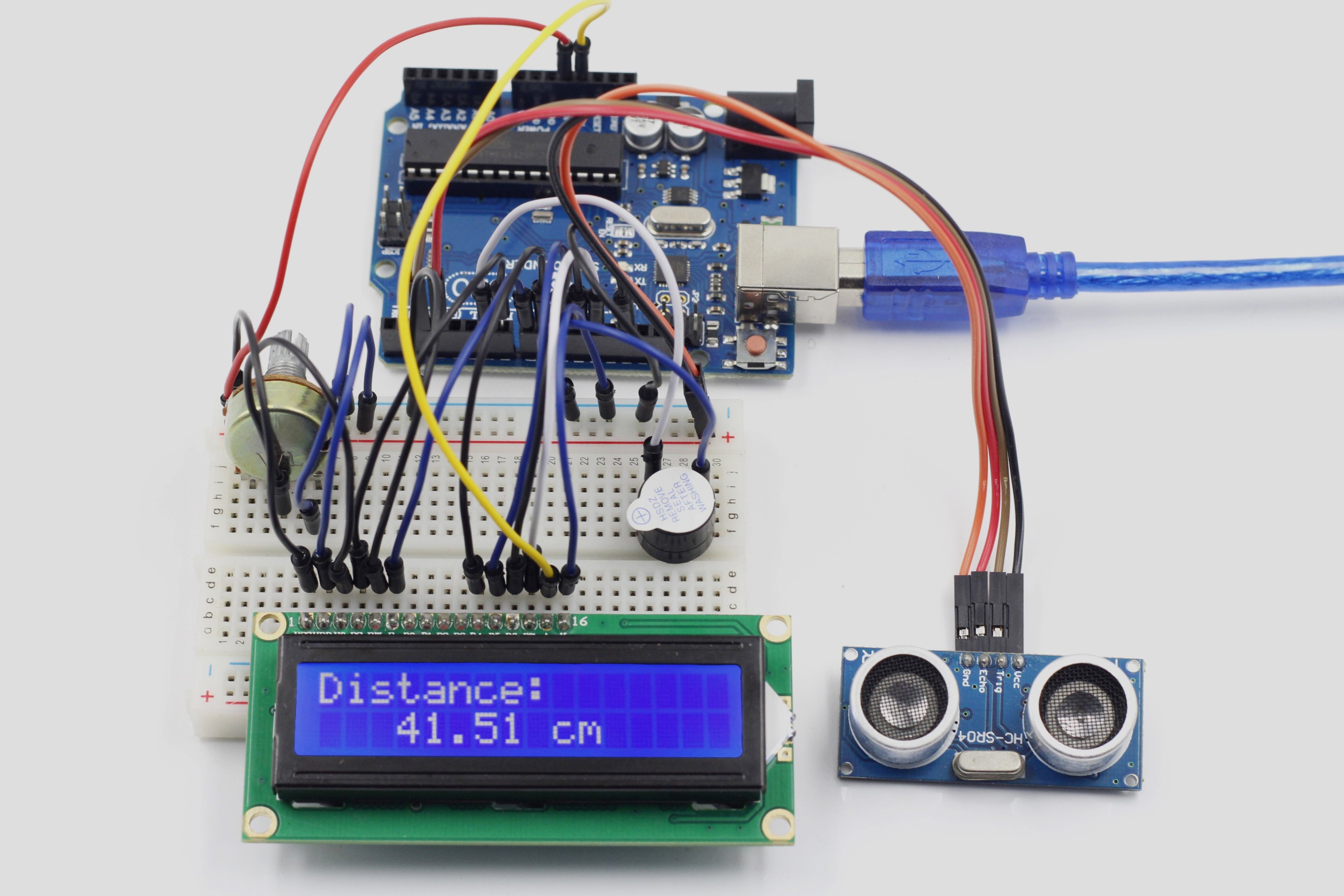
Now, if the distance between the ultrasonic and the obstacle is greater than 5cm and less than 15cm, the buzzer will make sounds in a low frequency; if the distance is less than 5cm, the buzzer will alarm and make sounds in a high frequency. At the same time, the current distance between the ultrasonic and the obstacle will display on LCD1602.
Code
| /*************************************** name:Backing a Car function:if the distance between the ultrasonic and the obstacle is greater than 5cm and less than 15cm, the buzzer will make sounds in a low frequency; if the distance is less than 5cm, the buzzer will alarm and make sounds in a high frequency. At the same time, the current distance between the ultrasonic and the obstacle will display on LCD1602. **************************************/ //Email:support@sunfounder.com //Website:www.sunfounder.com#include<LiquidCrystal.h>LiquidCrystal lcd(7, 8, 9, 10, 11, 12);//initialize the pin of LCD const int TrigPin = 2;//Trig attach to pin2 const int EchoPin = 3;//Echo attach to pin3 const int buzzer = 6;//buzzer attach to pin6 float cm;void setup() { Serial.begin(9600); //Sets the data rate in bits per second (baud) for serial data transmission //set the below pins as OUTPUT pinMode(TrigPin,OUTPUT); pinMode(EchoPin,INPUT); pinMode(buzzer,OUTPUT); lcd.begin(16,2); //Initializes the interface to the LCD screen lcd.print(“Reversing radar”); //display “Reversing radar” delay(2000); //delay 2s lcd.clear();//clear lcd }void loop()// { //set the frequency the pin Trig sends out pulses digitalWrite(TrigPin,LOW); delayMicroseconds(2); digitalWrite(TrigPin,HIGH); delayMicroseconds(10); digitalWrite(TrigPin,LOW); cm = pulseIn(EchoPin,HIGH)/58.0;// read the pulses at pin Echo, and record the time between the pulse becoming high and then turning into low, which is the length of a pulse. Then convert the length into cm cm = (int(cm * 100.0))/100.0; //turn the distance converted from time into a number showing two decimal places if(cm < 0)//If the distance is less than 0 { cm = 0; } lcd.setCursor(0,0); lcd.print(“Distance:”);//show the character “Distance:” on the LCD lcd.setCursor(0,1); //Place the cursor at Line 1, Column 0, which means the second line and first column lcd.print(” “);//Add 16 spaces to make sure the remaining characters in Line 1, if any, are cleared lcd.setCursor(3,1); // put the cursor at Line 1, Column 3. lcd.print(cm); //Display the distance on the LCD lcd.setCursor(9,1);//put the cursor at Line 1, Column 9 lcd.print(“cm”);//Display the character “cm” which is the unit delay(100);//delay 100ms if(cm < 15 & cm >= 5)//If the distance is 5 – 15 cm,buzzer beeping at low frequency { digitalWrite(buzzer, HIGH); delay(100); digitalWrite(buzzer, LOW); } else if(cm < 5 & cm >= 0)// If the distance is between 0 and 5 cm,buzzer keep beeping ceaselessly { digitalWrite(buzzer, HIGH); } else //If the distance is larger than 15cm, { digitalWrite(buzzer, HIGH); delay(100); digitalWrite(buzzer, LOW); delay(1000); } } |
Video