Introduction
In this lesson, we will learn how to use the acceleration sensor ADXL345.
Components
– 1 * Raspberry Pi
– 1 * Breadboard
– 1 * ADXL345 module
– Jumper wires
Principle
ADXL345
The ADXL345 is a small, thin, low power, 3-axis accelerometer with high resolution (13-bit) measurement at up to ±16 g. Digital output data is formatted as 16-bit two’s complement and is accessible through either an SPI (3- or 4-wire) or I2C digital interface.
The ADXL345 is well suited to measure the static acceleration of gravity in tilt-sensing applications, as well as dynamic acceleration resulting from motion or shock. Its high resolution (4 mg/LSB) enables the inclination change measurement by less than 1.0°. And the excellent sensitivity (3.9mg/LSB @2g) provides a high-precision output of up to ±16g.
In this experiment, I2C digital interface is used.
ADXL345 works like this:
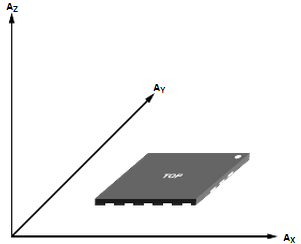
When you place the module face up, Z_OUT is at the maximum which is +1g; face down, Z_OUT is at the minimum. No matter of face, as long as it’s placed on a level surface, X_OUT increases along the Ax axis direction, so does Y_OUT along the Ay axis. See the picture below. Thus, when you rotate the module, you can see the changes of X_OUT, Y_OUT, and Z_OUT.
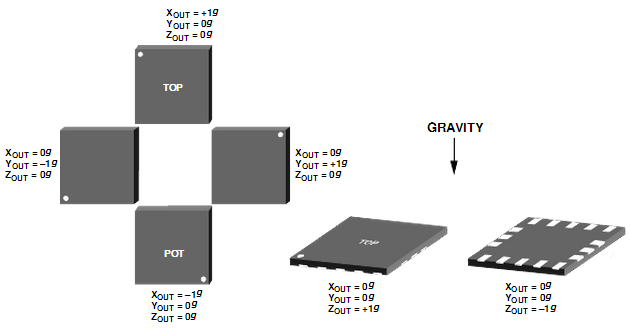
Relationship between output and gravity direction
Pin Function of ADXL345 Module:
| Name | Description |
| VS | Supply Voltage |
| CS | Chip Select; I2C mode is enabled if it’s tie-high to VDD I/O (VDD I/O = 1.8V). |
| SDO | Serial Data Out, alternate I2C address select |
| INT1 | Interrupt 1 Output |
| INT2 | Interrupt 2 Output |
| 3.3V | 3.3V |
| SDA | Serial Data (I2C), Serial Data In (SPI 4-Wire), Serial Data In/Out (SPI 3-Wire) |
| SCL | Serial Communications Clock |
| GND | GND |
Experimental Procedures
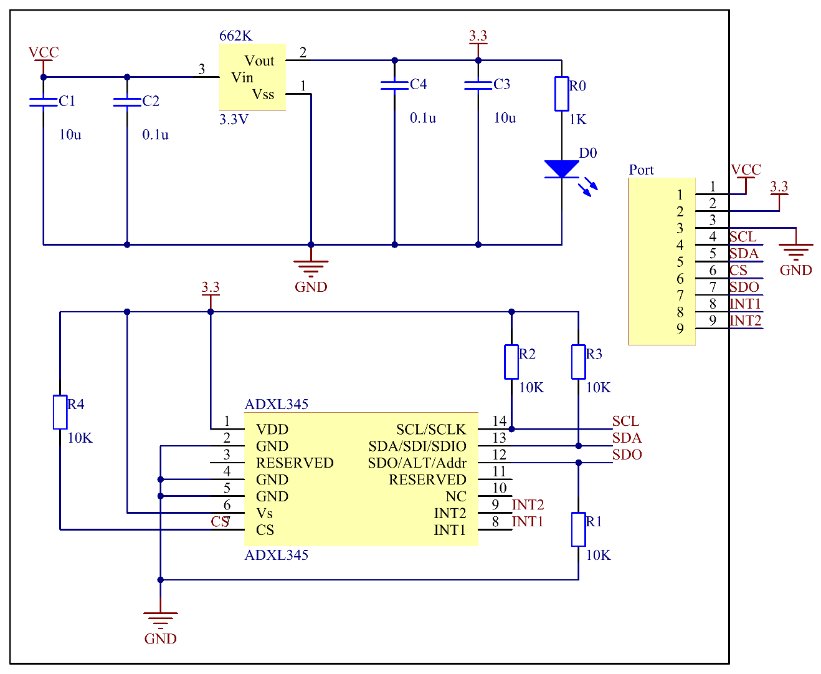
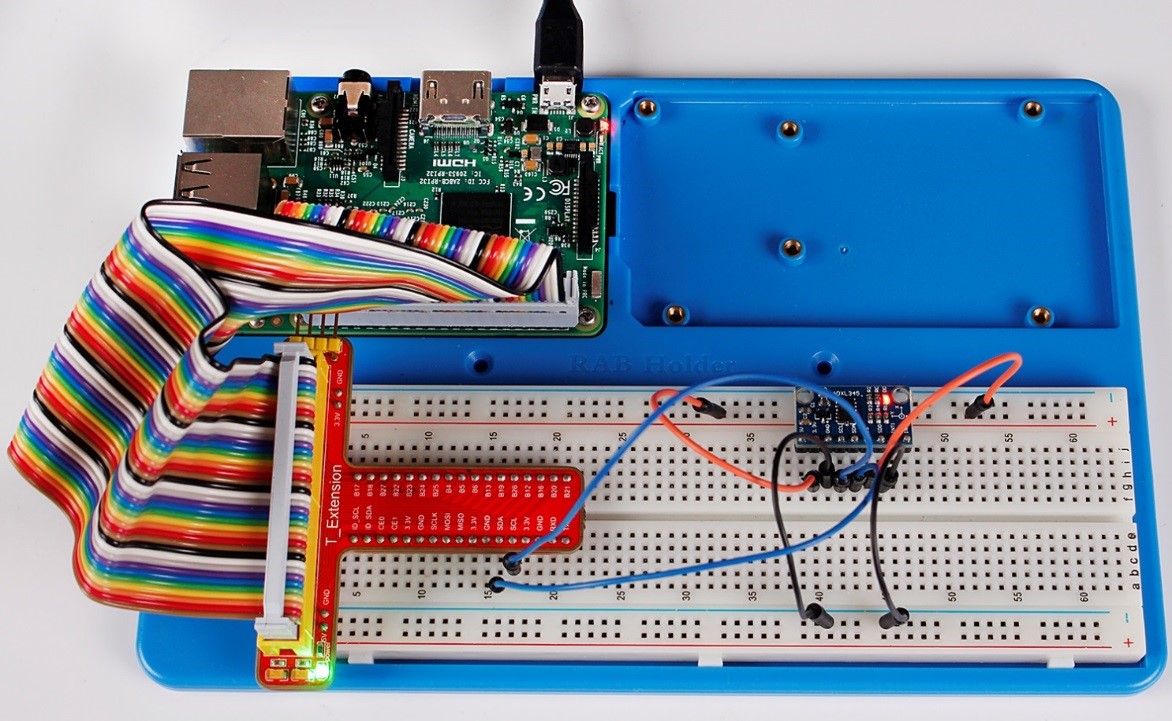
Step 1: Build the circuit
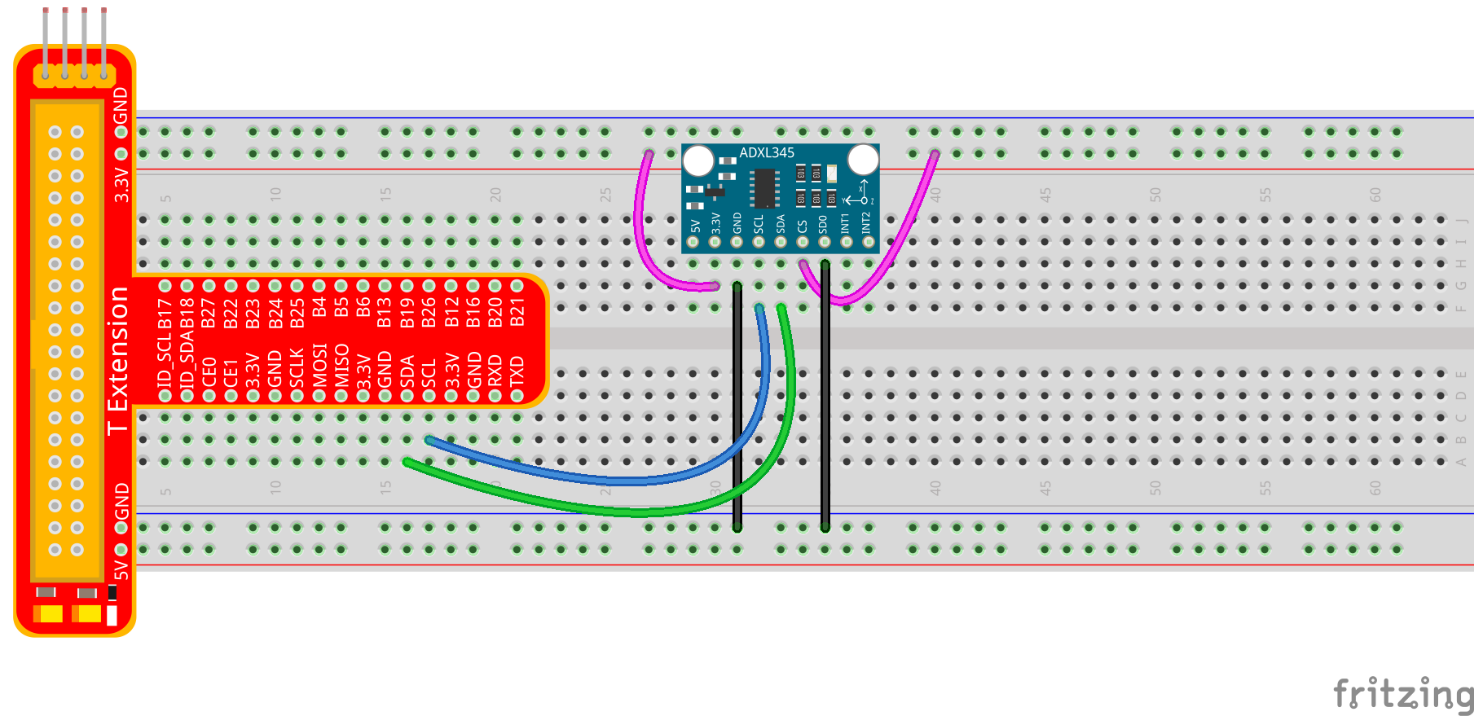
The I2C interface is used in the following program. Before running the program, please make sure the I2C driver module of Raspberry Pi has loaded normally.
For C language users:
Step 2: Get into the folder of code
cd /home/pi/SunFounder_Super_Kit_V3.0_for_Raspberry_Pi/C
Step 3: Compile the Code
make 17_adxl345
Step 4: Run
sudo ./17_adxl345
For Python users:
Step 2: Get into the folder of the code
cd /home/pi/SunFounder_Super_Kit_V3.0_for_Raspberry_Pi/Python
Step 3: Run
sudo python 17_ADXL345.py
Now, rotate the acceleration sensor, and you should see the values printed on the screen change.
C Code
/**********************************************************************
* Filename : adxl345.c
* Description : Use an adxl345
* Author : Robot
* E-mail : support@sunfounder.com
* website : www.sunfounder.com
* Update : Cavon 2016/07/01
**********************************************************************/
#include <wiringPiI2C.h>
#include <stdio.h>
#include <stdlib.h>
#include <errno.h>
#define DevAddr 0x53 //device address
struct acc_dat{
int x;
int y;
int z;
};
void adxl345_init(int fd)
{
wiringPiI2CWriteReg8(fd, 0x31, 0x0b);
wiringPiI2CWriteReg8(fd, 0x2d, 0x08);
// wiringPiI2CWriteReg8(fd, 0x2e, 0x00);
wiringPiI2CWriteReg8(fd, 0x1e, 0x00);
wiringPiI2CWriteReg8(fd, 0x1f, 0x00);
wiringPiI2CWriteReg8(fd, 0x20, 0x00);
wiringPiI2CWriteReg8(fd, 0x21, 0x00);
wiringPiI2CWriteReg8(fd, 0x22, 0x00);
wiringPiI2CWriteReg8(fd, 0x23, 0x00);
wiringPiI2CWriteReg8(fd, 0x24, 0x01);
wiringPiI2CWriteReg8(fd, 0x25, 0x0f);
wiringPiI2CWriteReg8(fd, 0x26, 0x2b);
wiringPiI2CWriteReg8(fd, 0x27, 0x00);
wiringPiI2CWriteReg8(fd, 0x28, 0x09);
wiringPiI2CWriteReg8(fd, 0x29, 0xff);
wiringPiI2CWriteReg8(fd, 0x2a, 0x80);
wiringPiI2CWriteReg8(fd, 0x2c, 0x0a);
wiringPiI2CWriteReg8(fd, 0x2f, 0x00);
wiringPiI2CWriteReg8(fd, 0x38, 0x9f);
}
struct acc_dat adxl345_read_xyz(int fd)
{
char x0, y0, z0, x1, y1, z1;
struct acc_dat acc_xyz;
x0 = 0xff - wiringPiI2CReadReg8(fd, 0x32);
x1 = 0xff - wiringPiI2CReadReg8(fd, 0x33);
y0 = 0xff - wiringPiI2CReadReg8(fd, 0x34);
y1 = 0xff - wiringPiI2CReadReg8(fd, 0x35);
z0 = 0xff - wiringPiI2CReadReg8(fd, 0x36);
z1 = 0xff - wiringPiI2CReadReg8(fd, 0x37);
printf(" x0 = %d ",x0);printf("x1 = %d \n",x1);
printf(" y0 = %d ",y0);printf("y1 = %d \n",y1);
printf(" z0 = %d ",z0);printf("z1 = %d \n",z1);
acc_xyz.x = (int)(x1 << 8) + (int)x0;
acc_xyz.y = (int)(y1 << 8) + (int)y0;
acc_xyz.z = (int)(z1 << 8) + (int)z0;
if(acc_xyz.x > 32767){
acc_xyz.x -= 65536;
}
if(acc_xyz.y > 32767){
acc_xyz.y -= 65536;
}
if(acc_xyz.z >32767){
acc_xyz.z -= 65536;
}
return acc_xyz;
}
int main(void)
{
int fd;
struct acc_dat acc_xyz;
fd = wiringPiI2CSetup(DevAddr);
if(-1 == fd){
perror("I2C device setup error");
}
adxl345_init(fd);
printf("\n");
printf("\n");
printf("========================================\n");
printf("| ADXL345 |\n");
printf("| ------------------------------ |\n");
printf("| SCL connect to SCL |\n");
printf("| SDA connect to SDA |\n");
printf("| |\n");
printf("| Read value from ADXL345 |\n");
printf("| |\n");
printf("| SunFounder|\n");
printf("========================================\n");
printf("\n");
printf("\n");
while(1){
acc_xyz = adxl345_read_xyz(fd);
printf("x: %d y: %d z: %d\n", acc_xyz.x, acc_xyz.y, acc_xyz.z);
delay(1000);
}
return 0;
}Python Code
#!/usr/bin/env python
from I2C import I2C
from time import sleep
class ADXL345(I2C):
ADXL345_ADDRESS = 0x53
ADXL345_REG_DEVID = 0x00 # Device ID
ADXL345_REG_DATAX0 = 0x32 # X-axis data 0 (6 bytes for X/Y/Z)
ADXL345_REG_POWER_CTL = 0x2D # Power-saving features control
ADXL345_DATARATE_0_10_HZ = 0x00
ADXL345_DATARATE_0_20_HZ = 0x01
ADXL345_DATARATE_0_39_HZ = 0x02
ADXL345_DATARATE_0_78_HZ = 0x03
ADXL345_DATARATE_1_56_HZ = 0x04
ADXL345_DATARATE_3_13_HZ = 0x05
ADXL345_DATARATE_6_25HZ = 0x06
ADXL345_DATARATE_12_5_HZ = 0x07
ADXL345_DATARATE_25_HZ = 0x08
ADXL345_DATARATE_50_HZ = 0x09
ADXL345_DATARATE_100_HZ = 0x0A # (default)
ADXL345_DATARATE_200_HZ = 0x0B
ADXL345_DATARATE_400_HZ = 0x0C
ADXL345_DATARATE_800_HZ = 0x0D
ADXL345_DATARATE_1600_HZ = 0x0E
ADXL345_DATARATE_3200_HZ = 0x0F
ADXL345_RANGE_2_G = 0x00 # +/- 2g (default)
ADXL345_RANGE_4_G = 0x01 # +/- 4g
ADXL345_RANGE_8_G = 0x02 # +/- 8g
ADXL345_RANGE_16_G = 0x03 # +/- 16g
def __init__(self, busnum=-1, debug=False):
self.accel = I2C(self.ADXL345_ADDRESS, busnum, debug)
if self.accel.readU8(self.ADXL345_REG_DEVID) == 0xE5:
# Enable the accelerometer
self.accel.write8(self.ADXL345_REG_POWER_CTL, 0x08)
def setRange(self, range):
# Read the data format register to preserve bits. Update the data
# rate, make sure that the FULL-RES bit is enabled for range scaling
format = ((self.accel.readU8(self.ADXL345_REG_DATA_FORMAT) & ~0x0F) |
range | 0x08)
# Write the register back to the IC
seld.accel.write8(self.ADXL345_REG_DATA_FORMAT, format)
def getRange(self):
return self.accel.readU8(self.ADXL345_REG_DATA_FORMAT) & 0x03
def setDataRate(self, dataRate):
# Note: The LOW_POWER bits are currently ignored,
# we always keep the device in 'normal' mode
self.accel.write8(self.ADXL345_REG_BW_RATE, dataRate & 0x0F)
def getDataRate(self):
return self.accel.readU8(self.ADXL345_REG_BW_RATE) & 0x0F
# Read the accelerometer
def read(self):
raw = self.accel.readList(self.ADXL345_REG_DATAX0, 6)
print raw
res = []
for i in range(0, 6, 2):
g = raw[i] | (raw[i+1] << 8)
if g > 32767:
g -= 65535
res.append(g)
return res
def print_msg():
print ("========================================")
print ("| ADXL345 |")
print ("| ------------------------------ |")
print ("| SCL connect to SCL |")
print ("| SDA connect to SDA |")
print ("| |")
print ("| Read value from ADXL345 |")
print ("| |")
print ("| SunFounder|")
print ("========================================\n")
print 'Program is running...'
print 'Please press Ctrl+C to end the program...'
raw_input ("Press anykey to begin\n")
# Simple example prints accelerometer data once per second:
def main():
accel = ADXL345()
while True:
x, y, z = accel.read()
print 'X: %d, Y: %d, Z: %d'%(x, y, z)
print ''
sleep(1) # Output is fun to watch if this is commented out
def destroy():
exit()
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
destroy()Copyright Notice
All contents including but not limited to texts, images, and code in this manual are owned by the SunFounder Company. You should only use it for personal study, investigation, enjoyment, or other non-commercial or nonprofit purposes, under the related regulations and copyrights laws, without infringing the legal rights of the author and relevant right holders. For any individual or organization that uses these for commercial profit without permission, the Company reserves the right to take legal action.