Introduction
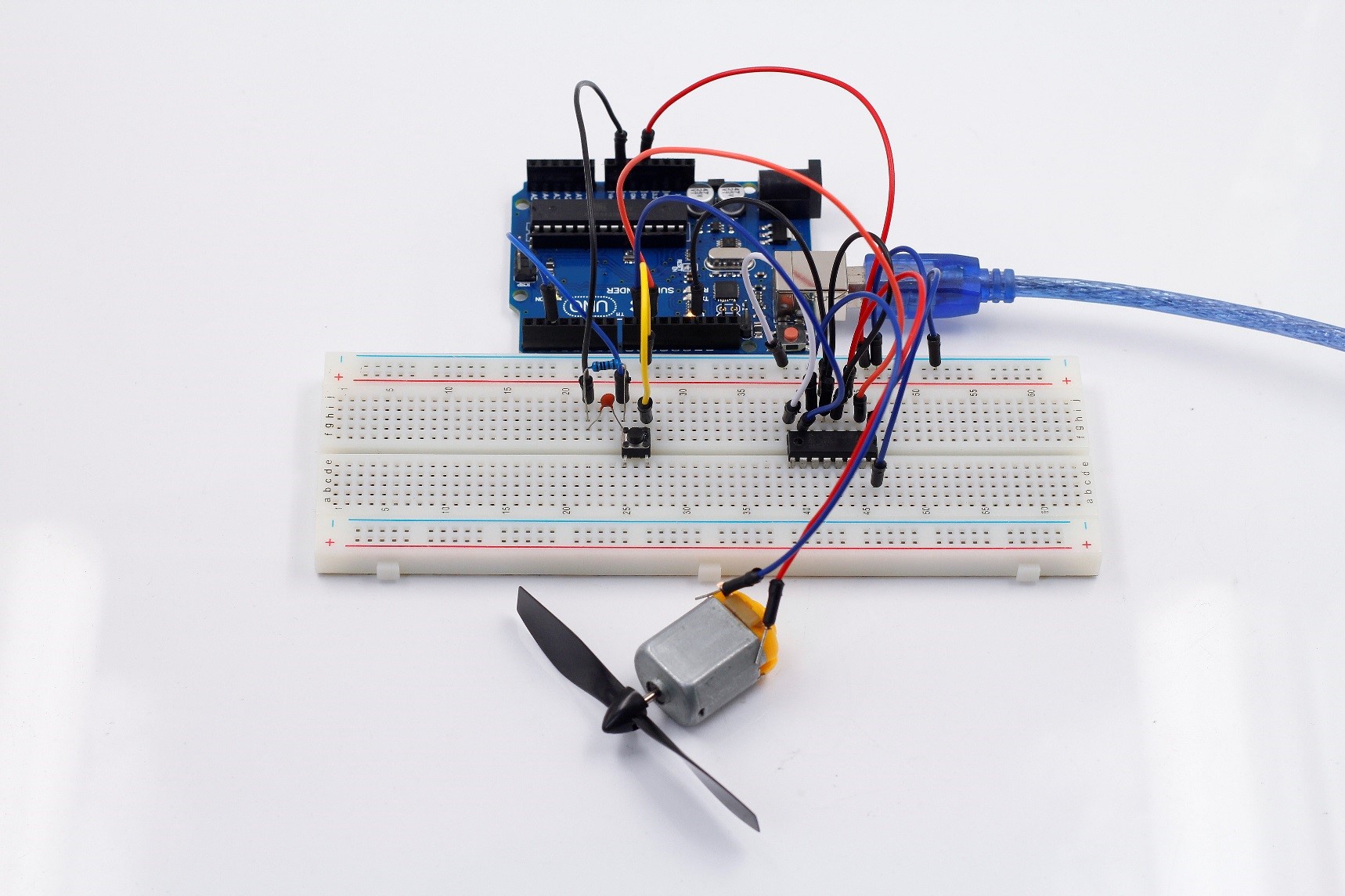
In this experiment, you will use a button and a motor together to assemble a small fan. You can shift the rotational speed, or gear selection, of the fan by pressing the button.
Components
– 1 * SunFounder Uno board
– 1 * Breadboard
– 1 * USB cable
– Jumper wires
– 1 * DC motor
– 1 * Resistor (10KΩ)
– 1 * Button
– 1 * Motor diver chip L293D
– 1 * 104 Ceramic Capacitor
– 1 * Fan
Principle
This experiment is to control the rotational speed of the motor by reading the times the button is pressed.
The fan has 4 gears. After startup, the default gear is 0 and the fan will not rotate. If the button is pressed once, the small fan will get into first gear (low speed) and rotate slowly; for pressing twice, it will get into the second gear (medium speed) and rotate at a medium pace; for pressing three times, it will get into third gear (high speed) and rotate rapidly. If the button is pressed four times, it will return to 0 gear and stop.
Experimental Procedures
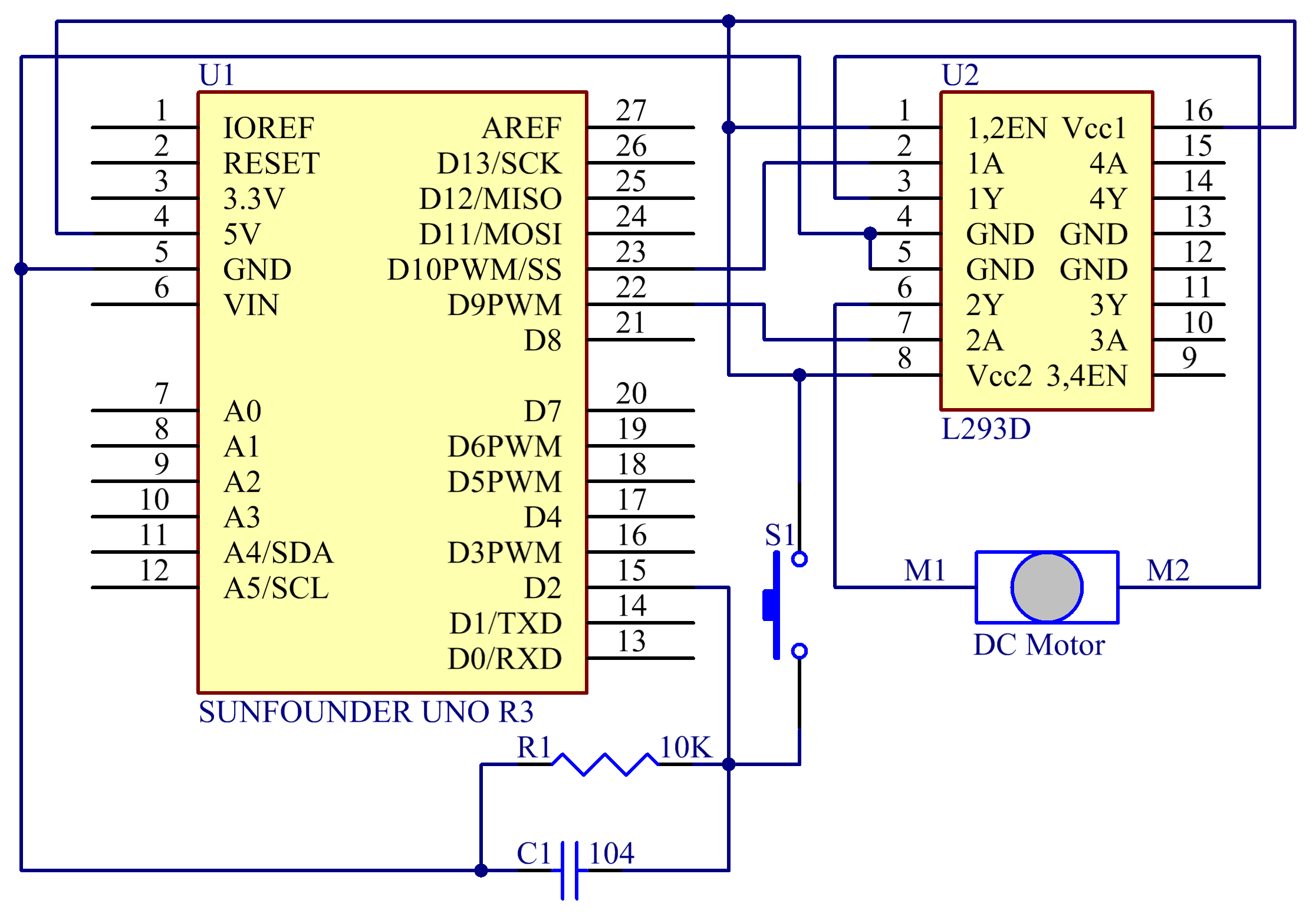
Step 1: Build the circuit
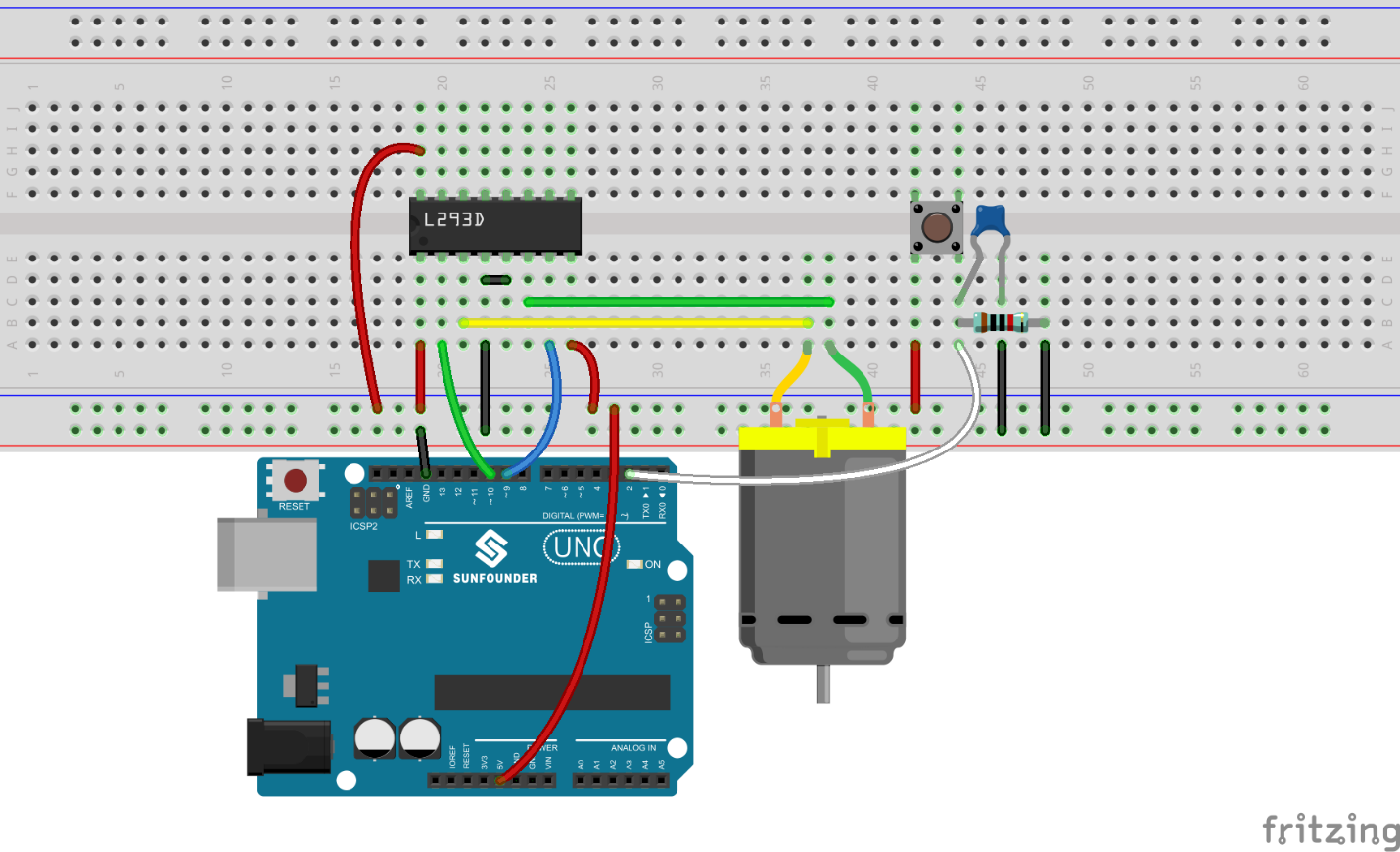
The schematic diagram
Step 2: Program (please go to our official website www.sunfounder.com to download related code by clicking LEARN -> Get Tutorials)
Step 3: Compile the code
Step 4: Upload the sketch to the SunFounder Uno board
As explained above, the times you press the button should change the rotational speed of the fan. Pressing it once will cause it to rotate slowly, while pressing it three times will cause it to rotate quickly, and pressing it four times will cause it to stop.
Code
| //Small Fan /**************************************************************** * As explained above, the amount of times you press the button should change the rotation speed of the fan. * Pressing it once will cause it to rotate slowly, * while pressing it three times will cause it to rotate quickly, and pressing it four times will cause it to stop. ****************************************************************/ //Email:support@sunfounder.com //Website:www.sunfounder.com //2015.5.7 // constants won’t change. They’re used here to // set pin numbers: const int buttonPin = 2; // the number of the pushbutton pin const int ledPin = 13; // the number of the LED pin const int motorIn1 = 9; const int motorIn2 = 10; int stat = 0; #define rank1 150 #define rank2 200 #define rank3 250 // Variables will change: int ledState = HIGH; // the current state of the output pin int buttonState; // the current reading from the input pin int lastButtonState = LOW; // the previous reading from the input pin// the following variables are long’s because the time, measured in miliseconds, // will quickly become a bigger number than can be stored in an int. long lastDebounceTime = 0; // the last time the output pin was toggled long debounceDelay = 50; // the debounce time; increase if the output flickers /******************************************************************************/ void setup() { //set theled,motors as OUTPUT,button as INPUT pinMode(buttonPin, INPUT); pinMode(ledPin, OUTPUT);pinMode(motorIn1,OUTPUT); pinMode(motorIn2,OUTPUT); // set initial LED state digitalWrite(ledPin, ledState); Serial.begin(9600); }void loop() { // read the state of the switch into a local variable: int reading = digitalRead(buttonPin);// check to see if you just pressed the button // (i.e. the input went from LOW to HIGH), and you’ve waited // long enough since the last press to ignore any noise:// If the switch changed, due to noise or pressing: if (reading != lastButtonState) { // reset the debouncing timer lastDebounceTime = millis(); }if ((millis() – lastDebounceTime) > debounceDelay) { // whatever the reading is at, it’s been there for longer // than the debounce delay, so take it as the actual current state:// if the button state has changed: if (reading != buttonState) { buttonState = reading;// only toggle the LED if the new button state is HIGH if (buttonState == HIGH) { ledState = !ledState; stat = stat + 1; if(stat >= 4) { stat = 0; } } } }// set the LED: digitalWrite(ledPin, ledState); // save the reading. Next time through the loop, // it’ll be the lastButtonState: switch(stat) { case 1: clockwise(rank1); break; case 2: clockwise(rank2); break; case 3: clockwise(rank3); break; default: clockwise(0); } lastButtonState = reading; } /***********************************************************/ void clockwise(int Speed)// { analogWrite(motorIn1,0); analogWrite(motorIn2,Speed); } /***********************************************************/ |
Video