Introduction
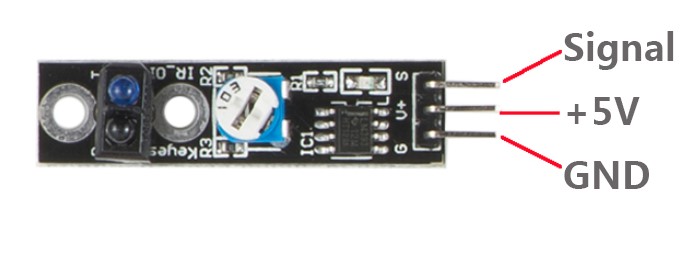
A tracking sensor (as shown below) has the same principle with an obstacle avoidance sensor except its smaller transmitting power.
Components
– 1 * Raspberry Pi
– 1 * Network cable (or USB wireless network adapter)
– 1 * Tracking sensor module
– Several jumper wires
Experimental Principle
When the infrared transmitter on the sensor emits rays to a piece of paper, if the rays shine on a white surface, they will be reflected and received by the receiver, and pin S will output low level; If the rays encounter black lines, they will be absorbed, thus the receiver gets nothing, and pin S will output high level.
Experimental Procedures
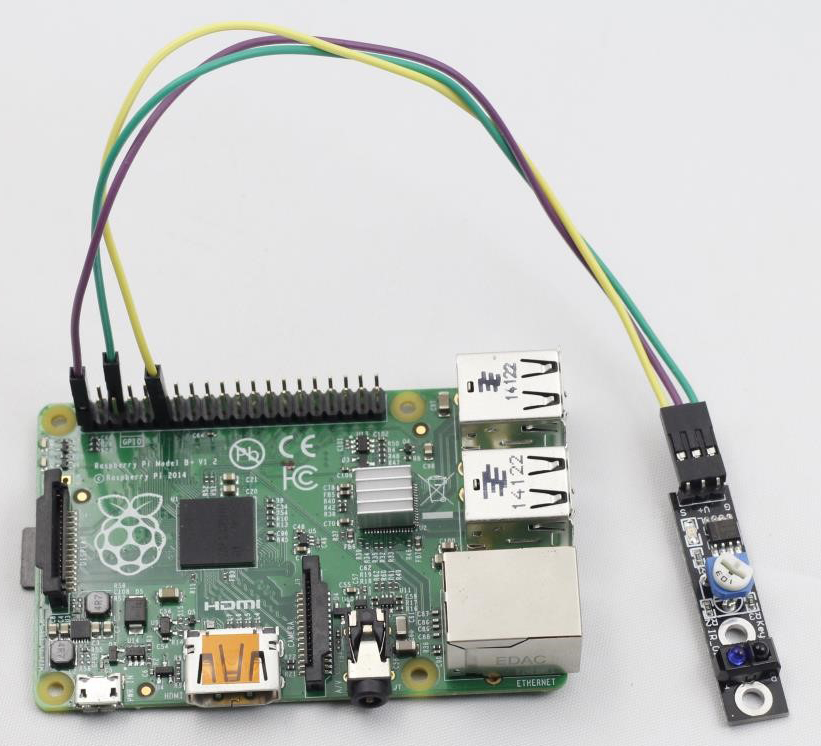
Step 1: Build the circuit
Raspberry Pi Tracking Sensor
GPIO0 —————————— S
3.3V ——————————– V+
GND ——————————— G
Step 2: Edit and save the code (see path/Rpi_SensorKit_code/22_trackSensor/ trackSensor.c)
Step 3: Compile
gcc trackSensor.c -lwiringPi
Step 4: Run
./a.out
Draw a black line on a white or light-color surface. When the tracking sensor encounters the black line, a string “Black Line is detected” will be printed on the screen.
trackSensor.c
#include <wiringPi.h>
#include <stdio.h>
#define TrackSensorPin 0
#define LedPin 1
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(TrackSensorPin, INPUT);
pinMode(LedPin, OUTPUT);
while(1){
if(digitalRead(TrackSensorPin) == LOW){
printf("White line is detected\n");
digitalWrite(LedPin, LOW); //led on
delay(100);
digitalWrite(LedPin, HIGH); //led off
}
else{
printf("...Black line is detected\n");
delay(100);
}
}
return 0;
}
Python Code
#!/usr/bin/env python
import RPi.GPIO as GPIO
TrackPin = 11
LedPin = 12
def setup():
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(LedPin, GPIO.OUT) # Set LedPin's mode is output
GPIO.setup(TrackPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.output(LedPin, GPIO.HIGH) # Set LedPin high(+3.3V) to off led
def loop():
while True:
if GPIO.input(TrackPin) == GPIO.LOW:
print '...led on'
GPIO.output(LedPin, GPIO.LOW) # led on
else:
print 'led off...'
GPIO.output(LedPin, GPIO.HIGH) # led off
def destroy():
GPIO.output(LedPin, GPIO.HIGH) # led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()