Introduction
The ultrasonic sensor uses sound to accurately detect objects and measure distances. It sends out ultrasonic waves and converts them into electronic signals.
Components
– 1 * Raspberry Pi
– 1 * Breadboard
– 1 * Network cable (or USB wireless network adapter)
– 1 * Ultrasonic ranging module
– Several jumper wires (M to F)
Experimental Principle
This sensor works by sending a sound wave out and calculating the time it takes for the sound wave to get back to the ultrasonic sensor. By doing this, it can tell us how far away objects are relative to the ultrasonic sensor.
Test distance = (high level time * velocity of sound (340M/S)) / 2 (in meters)
Experimental Procedures
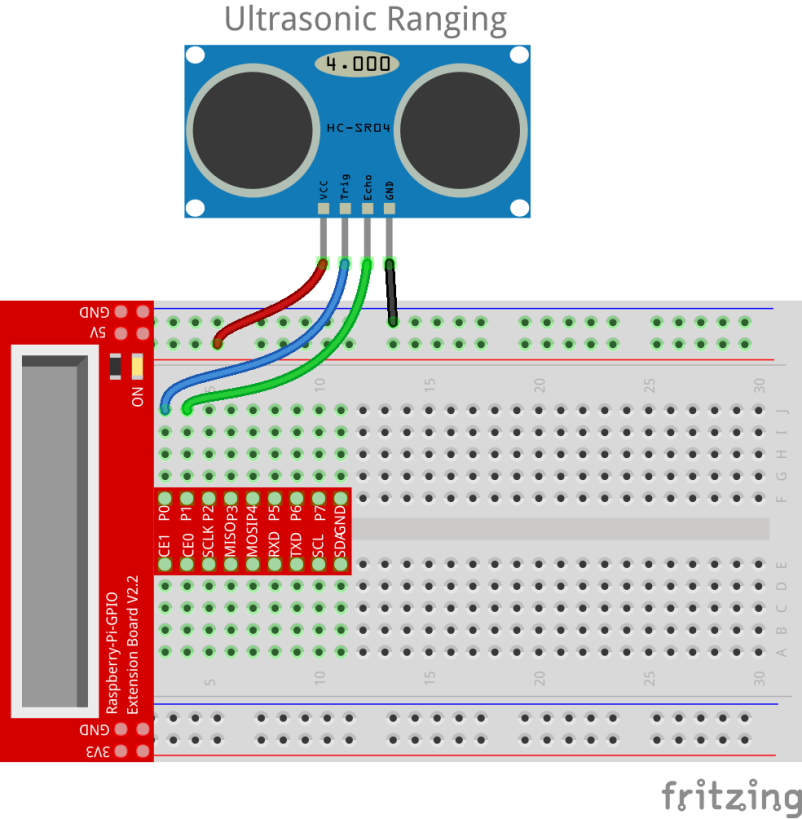
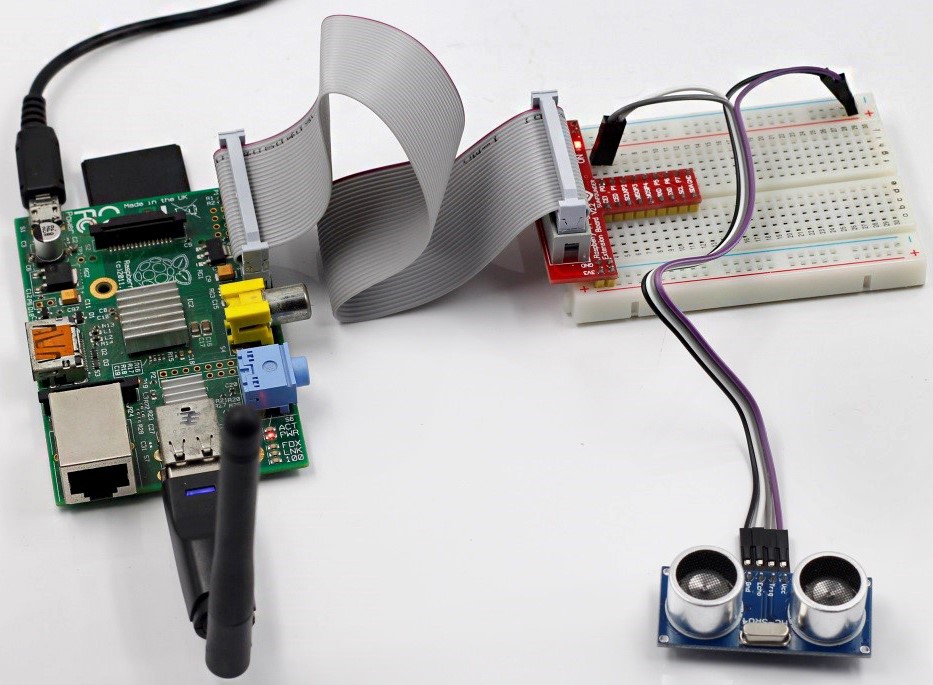
Step 1: Build the circuit
| Raspberry Pi | Ultrasonic Ranging Module |
| 5V | VCC |
| GPIO0 | Trig |
| GPIO1 | Echo |
| GND | GND |
For C language users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/C/25_ultrasonic_ranging/
Step 3: Compile
gcc ultrasonic_ranging.c -lwiringPi
Step 4: Run
sudo ./a.out
For Python users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/Python/
Step 3: Run
sudo python 25_ultrasonic_ranging.py
Now you can see the distance between the ultrasonic ranging module and the obstacle in front on the screen. Sway your hand over the ultrasonic ranging module slowly and observe the distance printed on the screen.
C Code
| /******************************* * Ultra Sonic Raning module Pin VCC should * be connected to 5V power. ******************************/ #include <wiringPi.h> #include <stdio.h> #include <sys/time.h>#define Trig 0 #define Echo 1void ultraInit(void) { pinMode(Echo, INPUT); pinMode(Trig, OUTPUT); }float disMeasure(void) { struct timeval tv1; struct timeval tv2; long time1, time2; float dis;digitalWrite(Trig, LOW); delayMicroseconds(2);digitalWrite(Trig, HIGH); delayMicroseconds(10); //send out ultrasonic pulses digitalWrite(Trig, LOW); while(!(digitalRead(Echo) == 1)); gettimeofday(&tv1, NULL); //get current timewhile(!(digitalRead(Echo) == 0)); gettimeofday(&tv2, NULL); //get current timetime1 = tv1.tv_sec * 1000000 + tv1.tv_usec; //microsecond time time2 = tv2.tv_sec * 1000000 + tv2.tv_usec;dis = (float)(time2 – time1) / 1000000 * 34000 / 2; //calculate the distancereturn dis; }int main(void) { float dis;if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen printf(“setup wiringPi failed !”); return 1; }ultraInit(); while(1){ dis = disMeasure(); printf(“%0.2f cm\n\n”,dis); delay(300); }return 0; } |
Python Code
| #!/usr/bin/env pythonimport RPi.GPIO as GPIO import timeTRIG = 11 ECHO = 12def setup(): GPIO.setmode(GPIO.BOARD) GPIO.setup(TRIG, GPIO.OUT) GPIO.setup(ECHO, GPIO.IN)def distance(): GPIO.output(TRIG, 0) time.sleep(0.000002)GPIO.output(TRIG, 1) time.sleep(0.00001) GPIO.output(TRIG, 0) while GPIO.input(ECHO) == 0: a = 0 time1 = time.time() while GPIO.input(ECHO) == 1: a = 1 time2 = time.time()during = time2 – time1 return during * 340 / 2 * 100def loop(): while True: dis = distance() print dis, ‘cm’ print ” time.sleep(0.3)def destroy(): GPIO.cleanup()if __name__ == “__main__”: setup() try: loop() except KeyboardInterrupt: destroy() |