Introduction
A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. Joysticks are often used to control video games and robots. A Joystick PS2 is used here.
Components
– 1 * Raspberry Pi
– 1 * Network cable (or USB wireless network adapter)
– 1 * ADC0832
– 1 * Joystick PS2 module
– Several jumper wires
Experimental Principle
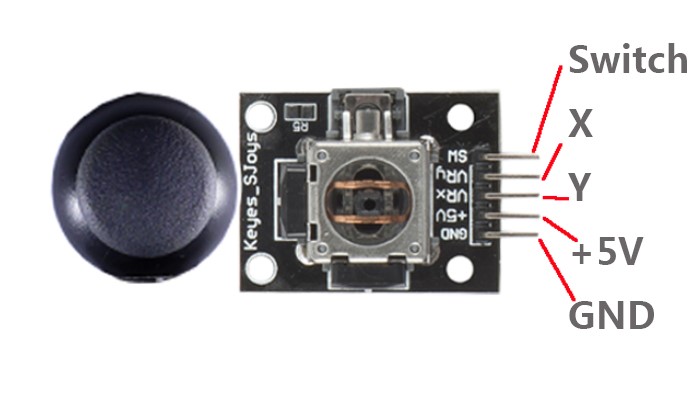
This module has two analog outputs (corresponding to X and Y biaxial offsets) and one digital output representing whether it is pressed on Z axis. The module integrates a power indicator and can display the working condition.
In this experiment, we connect pin X and Y to analog input ports of A/D convertor to convert analog quantity into digital quantity. Then program Raspberry Pi to detect the moving direction of the Joystick.
Experimental Procedures
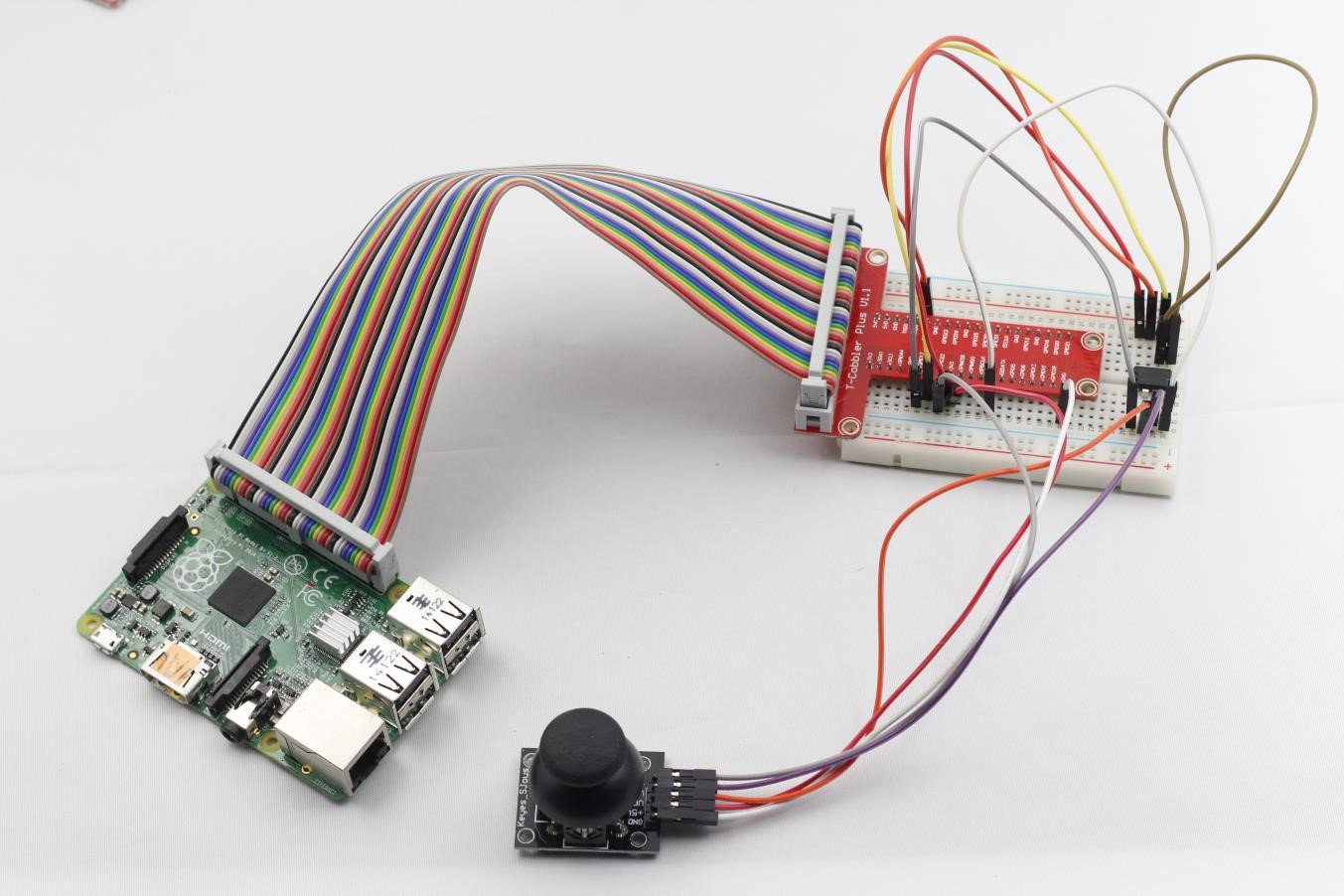
Step 1: Build the circuit
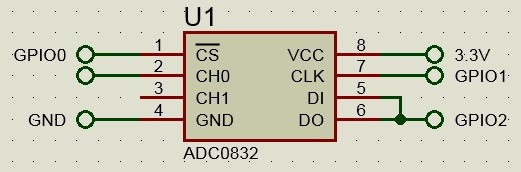
Connect pin VRx on Joystick PS2 module to pin CH0 on ADC0832;
Connect pin VRy on Joystick PS2 module to pin CH1 on ADC0832;
Connect pin SW on Joystick PS2 module to GPIO3 on Raspberry Pi.
Step 2: Edit and save the code (see path/Rpi_SensorKit_Code/27_joyStickPS2/joyStickPS2.c)
Step 3: Compile
gcc joyStickPS2.c -lwiringPi
Step 4: Run
./a.out
Push the rocker up and a string “Up” will be displayed on the screen; pull it down, “Down” will be displayed; push it left, “Left” will be displayed; push it right, “Right” will be displayed; Press the button and “Pressed” will be displayed on the screen.
joyStickPS2.c
#include <wiringPi.h>
#include <stdio.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define JoyStick_Z 3
uchar get_ADC_Result(uchar xyVal)
{
//10:CH0
//11:CH1
uchar i;
uchar dat1=0, dat2=0;
digitalWrite(ADC_CS, 0);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2); //CH0 10
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
if(xyVal == 'x'){
digitalWrite(ADC_DIO,0); delayMicroseconds(2); //CH0 0
}
if(xyVal == 'y'){
digitalWrite(ADC_DIO,1); delayMicroseconds(2); //CH1 1
}
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int main(void)
{
uchar tmp;
uchar xVal = 0, yVal = 0, zVal = 0;
if(wiringPiSetup() == -1){
printf("setup wiringPi failed !");
return 1;
}
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
pinMode(JoyStick_Z, INPUT);
pullUpDnControl(JoyStick_Z, PUD_UP);
while(1){
pinMode(ADC_DIO, OUTPUT);
xVal = get_ADC_Result('x');
if(xVal == 0){
tmp = 1; //up
}
if(xVal == 255){
tmp = 2; //down
}
yVal = get_ADC_Result('y');
if(yVal == 0){
tmp = 3; //left
}
if(yVal == 255){
tmp = 4; //right
}
zVal = digitalRead(JoyStick_Z);
if(zVal == 0){
printf("Button is pressed !\n");
}
//printf("x : %d y : %d z : %d\n", xVal, yVal, zVal);
switch(tmp){
case 1: printf("up\n"); break;
case 2: printf("down\n"); break;
case 3: printf("right\n"); break;
case 4: printf("left\n"); break;
default:
break;
}
//delay(500);
}
return 0;
}
Python Code
#!/usr/bin/env python
#------------------------------------------------------
#
# This is a program for JoystickPS2 Module.
#
# This program depend on ADC0832 ADC chip. Follow
# the instruction book to connect the module and
# ADC0832 to your Raspberry Pi.
#
#------------------------------------------------------
import ADC0832
import RPi.GPIO as GPIO
import time
btn = 15 # Define button pin
def setup():
ADC0832.setup() # Setup ADC0832
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(btn, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Setup button pin as input an pull it up
global state
state = ['up', 'down', 'left', 'right']
def getResult(): #get joystick result
if ADC0832.getResult1() == 0:
return 1 #up
if ADC0832.getResult1() == 255:
return 2 #down
if ADC0832.getResult() == 0:
return 3 #left
if ADC0832.getResult() == 255:
return 4 #right
if GPIO.input(btn) == 1:
print 'Button is pressed!' # Button pressed
def loop():
while True:
tmp = getResult()
if tmp != None:
print state[tmp - 1]
def destory():
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destory()