Introduction
After having learnt so many modules, let’s use several together to make a comprehensive experiment – use an RGB LED, a buzzer and a DS18B20 to build an interesting and useful temperature measurement system.
Components
– 1 * Raspberry Pi
– 1 * Breadboard
– 1 * Active Buzzer
– 1 * RGB LED
– 1 * DS18B20
– Several jumper wires
Experimental Principle
When the ambient temperature is lower than the upper limit value, the buzzer will beep at a low frequency and the LED will flash blue; when the temperature is higher than lower limit value, the buzzer will beep at a relatively high frequency and the LED will flash red; when the temperature is between two values, the buzzer will keep silent and the LED will be green.
Note: The lower and upper limit values here can be defined and achieved by passing parameters to the main function.
Experimental Procedures
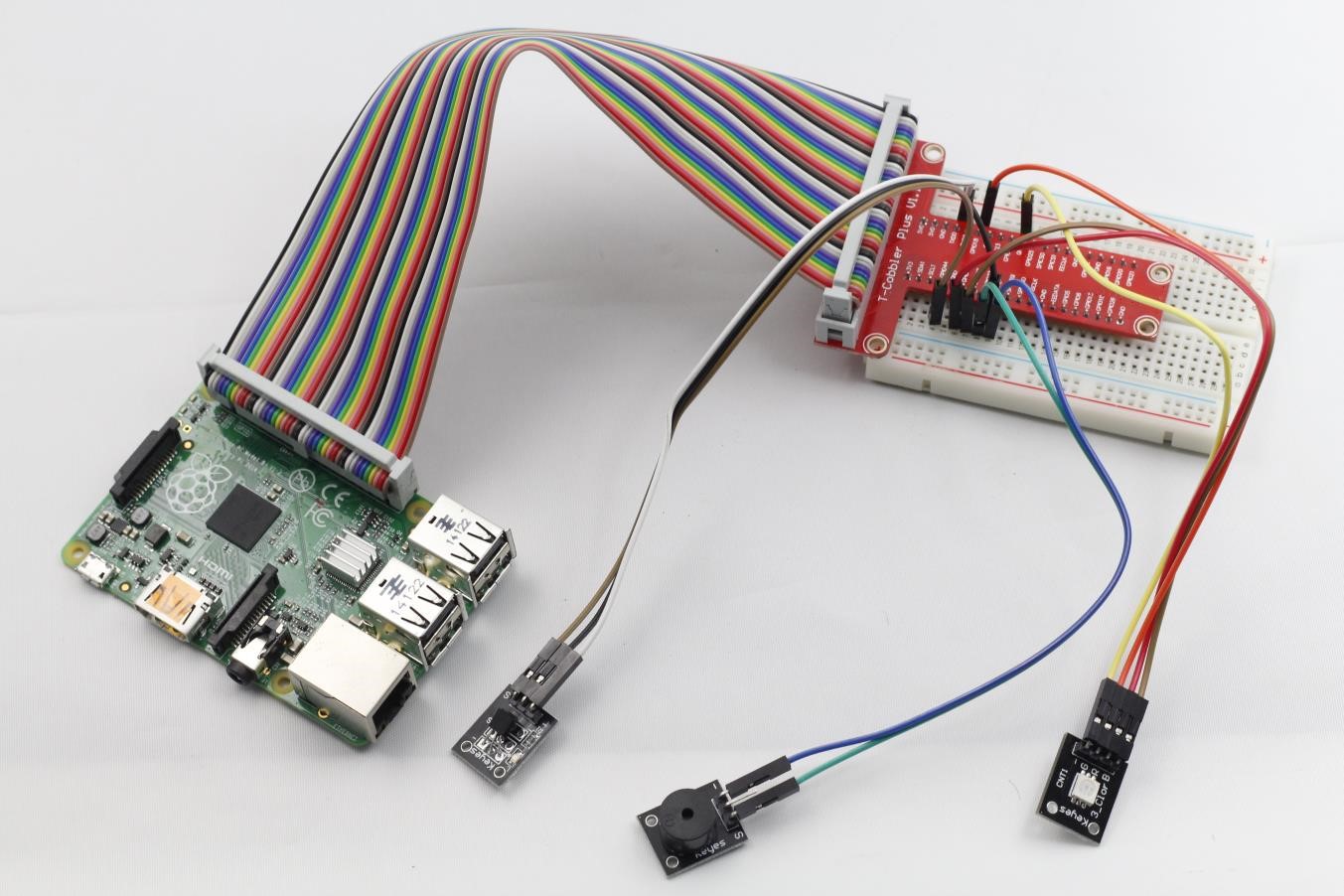
Step 1: Build the circuit
DS18b20 module connection:
DS18B20 Raspberry Pi
S ——————————— GPIO7
RGB LED connection:
RGB LED Raspberry Pi
R ————————————– GPIO0
G ————————————–GPIO1
B ————————————– GPIO2
Buzzer module connection:
Buzzer Module Raspberry Pi
– —————————————– GND
S —————————————– GPIO3
Step 2: Edit and save the code (see path/Rpi_SensorKit_Code/29_expand01/tempMonitor.c)
Step 3: Compile
gcc tempMonitor.c -lwiringPi
Step 4: Run
./a.out 25 30
Now, when the ambient temperature is lower than the lower limit value (25℃), the buzzer beeps at a lower frequency and the LED flashes blue; when it is higher than the upper limit value (30℃), the buzzer beeps at a relatively higher frequency and the LED flashes red. When it is between the two values, the buzzer is silent and the LED keeps green.
tempMonitor.c
#include <wiringPi.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h> #include="" <stdlib.h>="" <stdio.h>="" #define="" ledred="" 0="" ledgreen="" 1="" ledblue="" 2="" beep="" 3="" bufsize="" 128="" typedef="" unsigned="" char="" uchar;="" int="" uint;="" void="" beepinit(void)="" {="" pinmode(beep,="" output);="" }="" beepctrl(int="" t)="" digitalwrite(beep,="" low);="" delay(t);="" high);="" float="" tempread(void)="" temp;="" i,="" j;="" fd;="" ret;="" buf[bufsize];="" tempbuf[5];="" fd="open("/sys/bus/w1/devices/28-00000495db35/w1_slave"," o_rdonly);="" if(-1="=" fd){="" perror("open="" device="" file="" error");="" return="" 1;="" while(1){="" ret="read(fd," buf,="" bufsize);="" if(0="=" ret){="" break;="" if(errno="=" eintr){="" continue;="" perror("read()");="" close(fd);="" for(i="0;i<sizeof(buf);i++){" if(buf[i]="=" 't'){="" for(j="0;j<sizeof(tempBuf);j++){" tempbuf[j]="buf[i+2+j];" temp="(float)atoi(tempBuf)" 1000;="" ledinit(void)="" pinmode(ledred,="" pinmode(ledgreen,="" pinmode(ledblue,="" *="" ledctrl(int="" n,="" state)="" digitalwrite(n,="" state);="" main(int="" argc,="" *argv[])="" i;="" low,="" high;="" if(argc="" !="3){" printf("usage="" :="" .="" a.out="" [temperature="" lower="" limit]="" [upper="" limit]\n");="" printf("for="" example="" 29="" 31\n");="" 0;="" low="atoi(argv[1]);" high="atoi(argv[2]);" if(low="" >="high){" printf("parameters="" error,="" limit="" should="" be="" less="" than="" upper="" limit\n");="" if(wiringpisetup()="=" -1){="" when="" initialize="" wiring="" failed,print="" messageto="" screen="" printf("setup="" wiringpi="" failed="" !");="" ledinit();="" beepinit();="" printf("the="" of="" temperature="" %d\n",="" printf("current="" %0.3f\n",="" temp);="" if(temp="" <="" low){="" ledctrl(ledblue,="" ledctrl(ledred,="" ledctrl(ledgreen,="" 3;="" i++){="" beepctrl(500);="" &&="" high){="" beepctrl(100);="" <="" pre="">
</errno.h>>Python Code
#!/usr/bin/env python
import RPi.GPIO as GPIO
import time
import os
import sys
# Define RGB LED pin
LedRed = 11
LedGreen = 12
LedBlue = 13
# Define Buzzer pin
Buzzer = 15
def beep(x):
GPIO.output(Buzzer, 0)
time.sleep(x)
GPIO.output(Buzzer, 1)
time.sleep(x)
def tempRead():
global ds18b20
address = '/sys/bus/w1/devices/' + ds18b20 + '/w1_slave'
tfile = open(address)
text = tfile.read()
tfile.close()
secondline = text.split("\n")[1]
temperaturedata = secondline.split(" ")[9]
temperature = float(temperaturedata[2:])
temperature = temperature / 1000
return temperature
def map(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
def ds18b20Init():
global ds18b20
for i in os.listdir('/sys/bus/w1/devices'):
if i[:2] == '28':
ds18b20 = i
def setup():
GPIO.setmode(GPIO.BOARD)
# Buzzer setup:
GPIO.setup(Buzzer, GPIO.OUT)
GPIO.output(Buzzer, 1)
# RGB setup:
GPIO.setup(LedRed, GPIO.OUT, initial=GPIO.LOW)
GPIO.setup(LedGreen, GPIO.OUT, initial=GPIO.LOW)
GPIO.setup(LedBlue, GPIO.OUT, initial=GPIO.LOW)
# DS18B20 setup:
ds18b20Init()
def loop():
if len(sys.argv) != 3:
print 'Usage:'
print ' sudo python 29_expand01.py [temperature lower limit] [upper limit]'
print 'For example: sudo python 29_expand01.py 29 31\n'
destroy()
quit()
low = float(sys.argv[1])
high = float(sys.argv[2])
if low >= high:
print 'Parameters error, lower limit should be less than upper limit'
destroy()
quit()
print 'System is running...'
print 'The lower limit of temperature:', low
print 'The upper limit of temperature:', high
while True:
# Read temperature from ds18B20
temp = tempRead()
print 'Current temperature:', temp
# Under/Over limit alarm:
if temp < low:
GPIO.output(LedBlue, 1);
GPIO.output(LedRed, 0);
GPIO.output(LedGreen, 0);
for i in range(0, 4):
beep(0.25)
if temp >= low and temp < high:
GPIO.output(LedBlue, 0);
GPIO.output(LedRed, 0);
GPIO.output(LedGreen, 1);
time.sleep(1)
if temp >= high:
GPIO.output(LedBlue, 0);
GPIO.output(LedRed, 1);
GPIO.output(LedGreen, 0);
for i in range(0, 8):
beep(0.125)
def destroy():
GPIO.output(LedRed, 0)
GPIO.output(LedGreen, 0)
GPIO.output(LedBlue, 0)
GPIO.output(Buzzer, 1)
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt:
destroy()