Introduction
The infrared tracking sensor uses a TRT5000 sensor. The blue LED of TRT5000 is the emission tube and after electrified it emits infrared light invisible to human eye. The black part of the sensor is for receiving; the resistance of the resistor inside changes with the infrared light received.
Components
– 1 * Raspberry Pi
– 1 * Breadboard
– 1 * Network cable (or USB wireless network adapter)
– 1 * Tracking sensor module
– 1 * 3-Pin anti-reverse cable
Experimental Principle
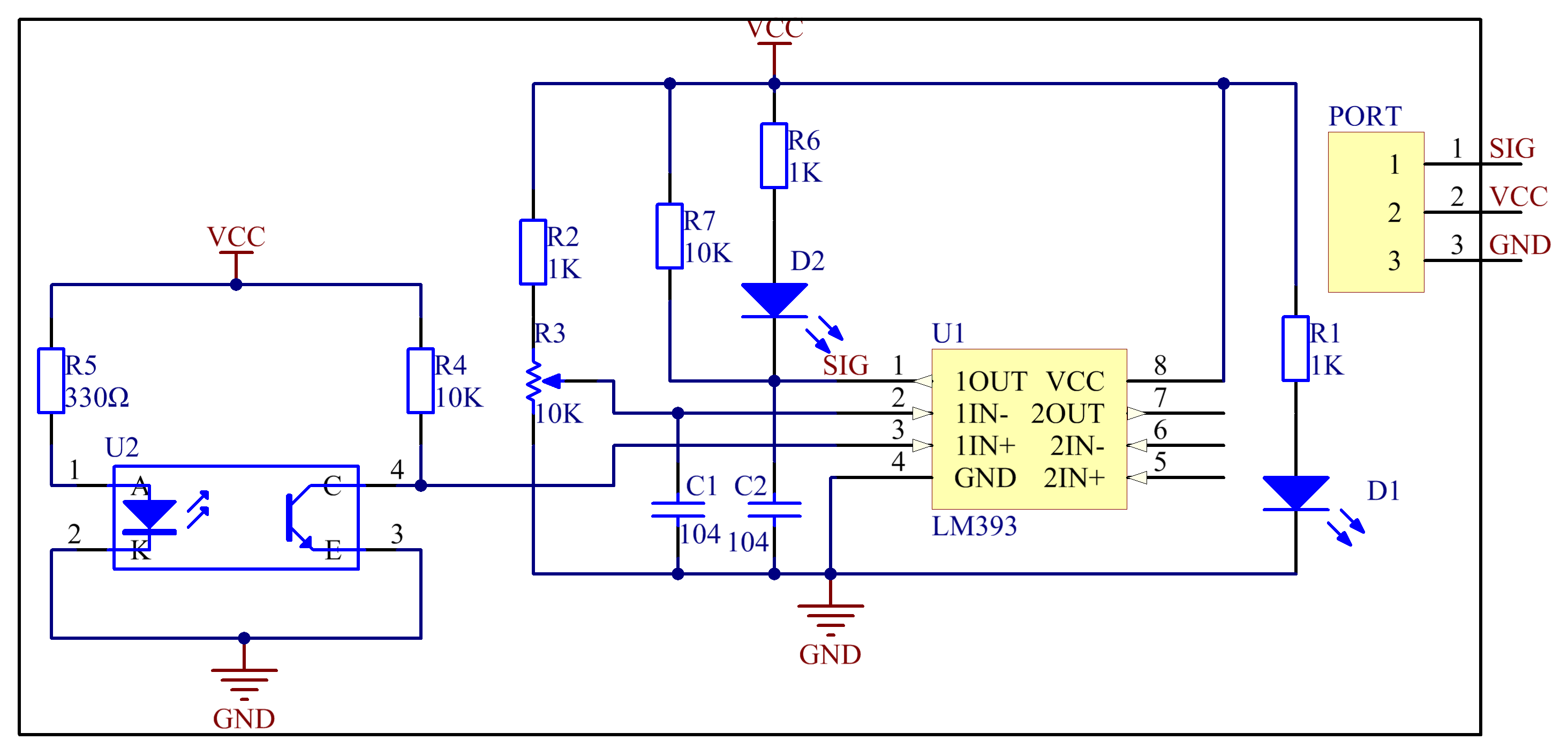
When the infrared transmitter emits rays to a piece of paper, if the rays shine on a white surface, they will be reflected and received by the receiver, and pin SIG will output low level; If the rays encounter black lines, they will be absorbed, thus the receiver gets nothing, and pin SIG will output high level. The schematic diagram:
Experimental Procedures
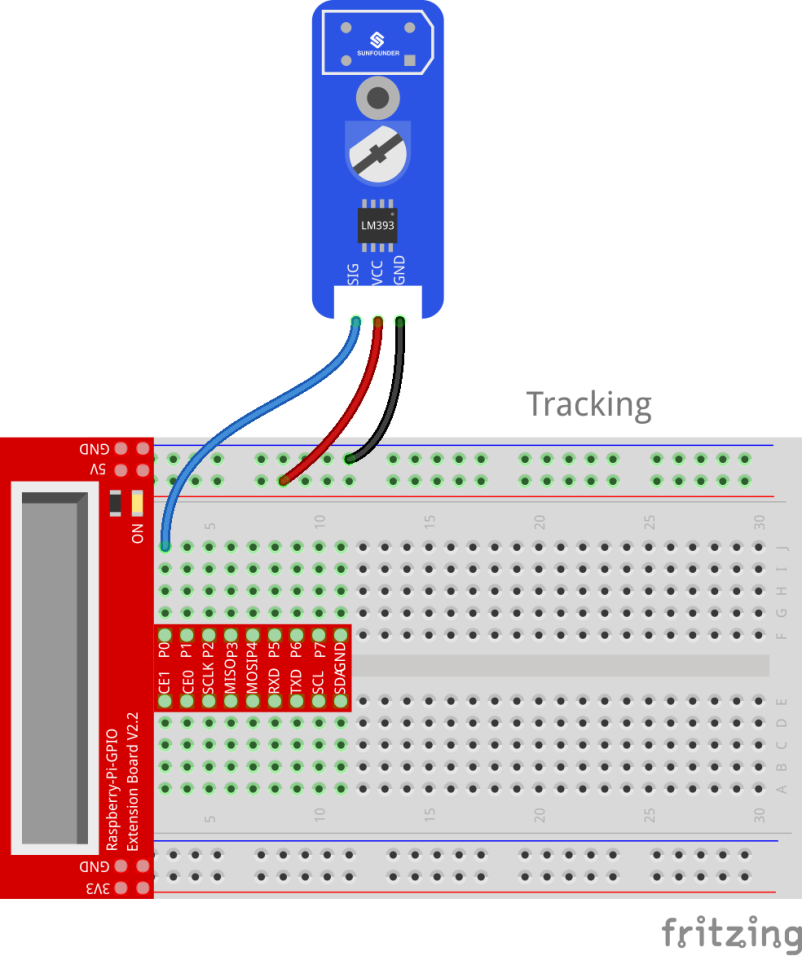
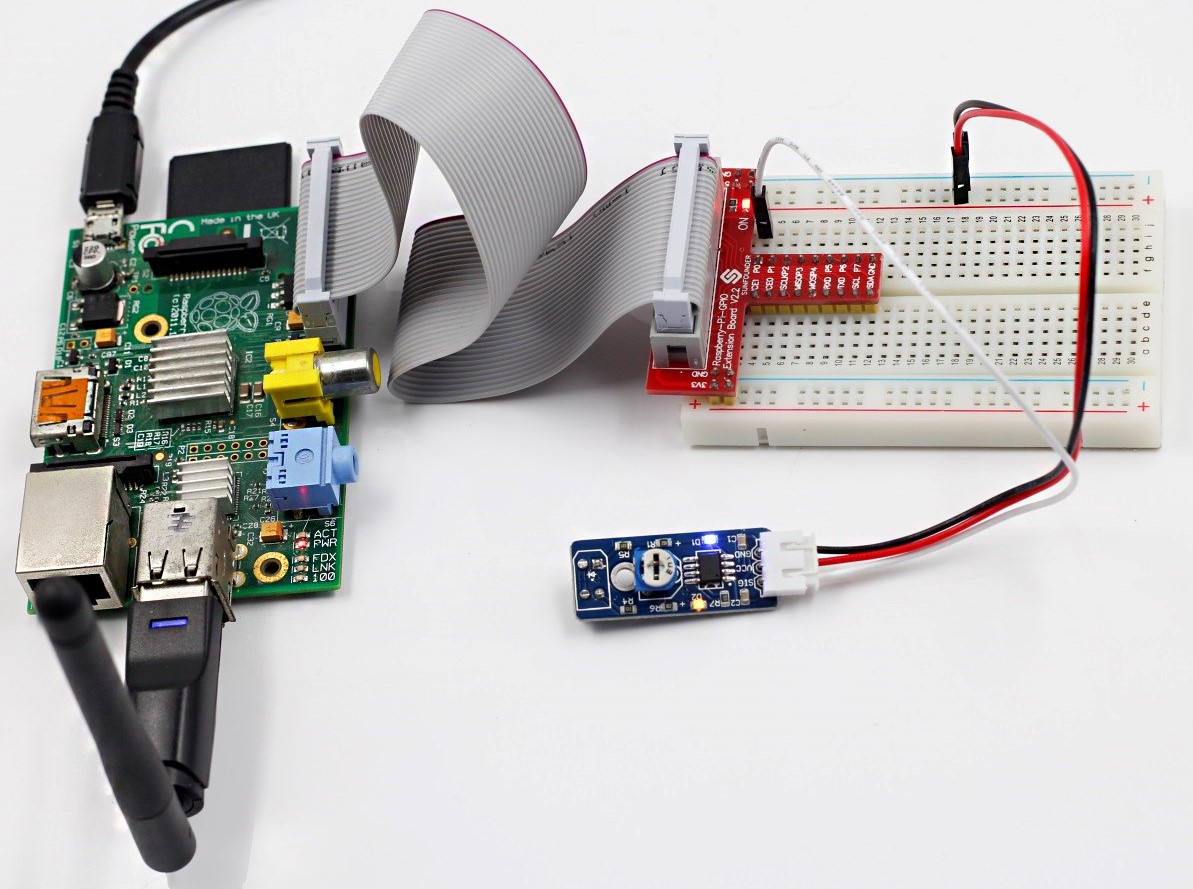
Step 1: Build the circuit
| Raspberry Pi | Tracking Sensor Module |
| GPIO0 | SIG |
| 5V | VCC |
| GND | GND |
For C language users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/C/34_tracking/
Step 3: Compile
gcc tracking.c -lwiringPi
Step 4: Run
sudo ./a.out
For Python users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/Python/
Step 3: Run
sudo python 34_tracking.py
When the tracking sensor encounters black lines, a string “Black Line is detected” will be printed on the screen.
C Code
#include <wiringPi.h>
#include <stdio.h>
#define TrackSensorPin 0
#define LedPin 1
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(TrackSensorPin, INPUT);
pinMode(LedPin, OUTPUT);
while(1){
if(digitalRead(TrackSensorPin) == LOW){
printf("White line is detected\n");
digitalWrite(LedPin, LOW); //led on
delay(100);
digitalWrite(LedPin, HIGH); //led off
}
else{
printf("...Black line is detected\n");
delay(100);
}
}
return 0;
}
Python Code
#!/usr/bin/env python
import RPi.GPIO as GPIO
TrackPin = 11
LedPin = 12
def setup():
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(LedPin, GPIO.OUT) # Set LedPin's mode is output
GPIO.setup(TrackPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.output(LedPin, GPIO.HIGH) # Set LedPin high(+3.3V) to off led
def loop():
while True:
if GPIO.input(TrackPin) == GPIO.LOW:
print 'White line is detected'
GPIO.output(LedPin, GPIO.LOW) # led on
else:
print '...Black line is detected'
GPIO.output(LedPin, GPIO.HIGH) # led off
def destroy():
GPIO.output(LedPin, GPIO.HIGH) # led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()