Overview
This lesson is how to command the Lizard to turn right then stop.
Programming
Click the icon on the desktop to open the Mixly and you’ll be on the homepage:
Click the Lizard category, you can see the Turning Right Speed Module.Click and drag the Turning Right Speed Module into the coding area:

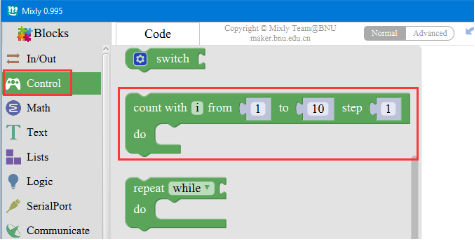
Enter a value for the times of turning right, as shown below, drag the Count with Module from the Control contents.
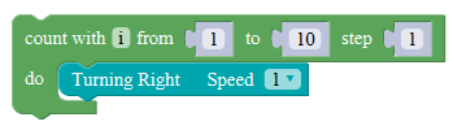
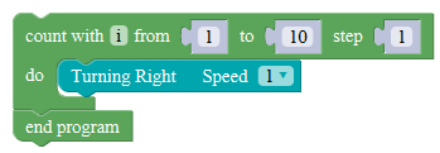
Combine them together, as shown below:
Click and drag the end program block from the Control contents.
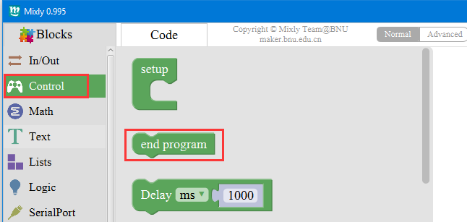
Combine them together as shown below:
As shown below, the number can be changed by users. Here 7 means turn right for 7 times, which is same with turning left for 90 degrees. The number can be changed by the users’ willingness.
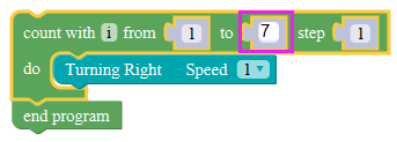
By the time, the procedure had all be finished. This procedure is made of 3 blocks, the Turning Right Speed Module, which controls the Lizard turn right. The Count with Module controls the times of turning right, and the end program block commands the program to be end.
Connect the Lizard with computer by the USB cable as shown below:
Select the board type: Arduino Nano, and select the serial port for upload:

Select the Port according to your actual situation. (Here just take COM3 as an example).
Upload the program to Lizard:

Then you can see the Lizard turn right for 7 steps then stop.