Introduction
The tilt-switch module (as shown below) used here is a ball one with a metal ball inside. It is used to detect inclinations of a small angle.

Components
– 1 * Raspberry Pi
– 1 * Breadboard
– 1 * Network cable (or USB wireless network adapter)
– 1 * Dual-color LED module
– 1 * Tilt-switch module
– 2 * 3-Pin anti-reverse cable
Experimental Principle
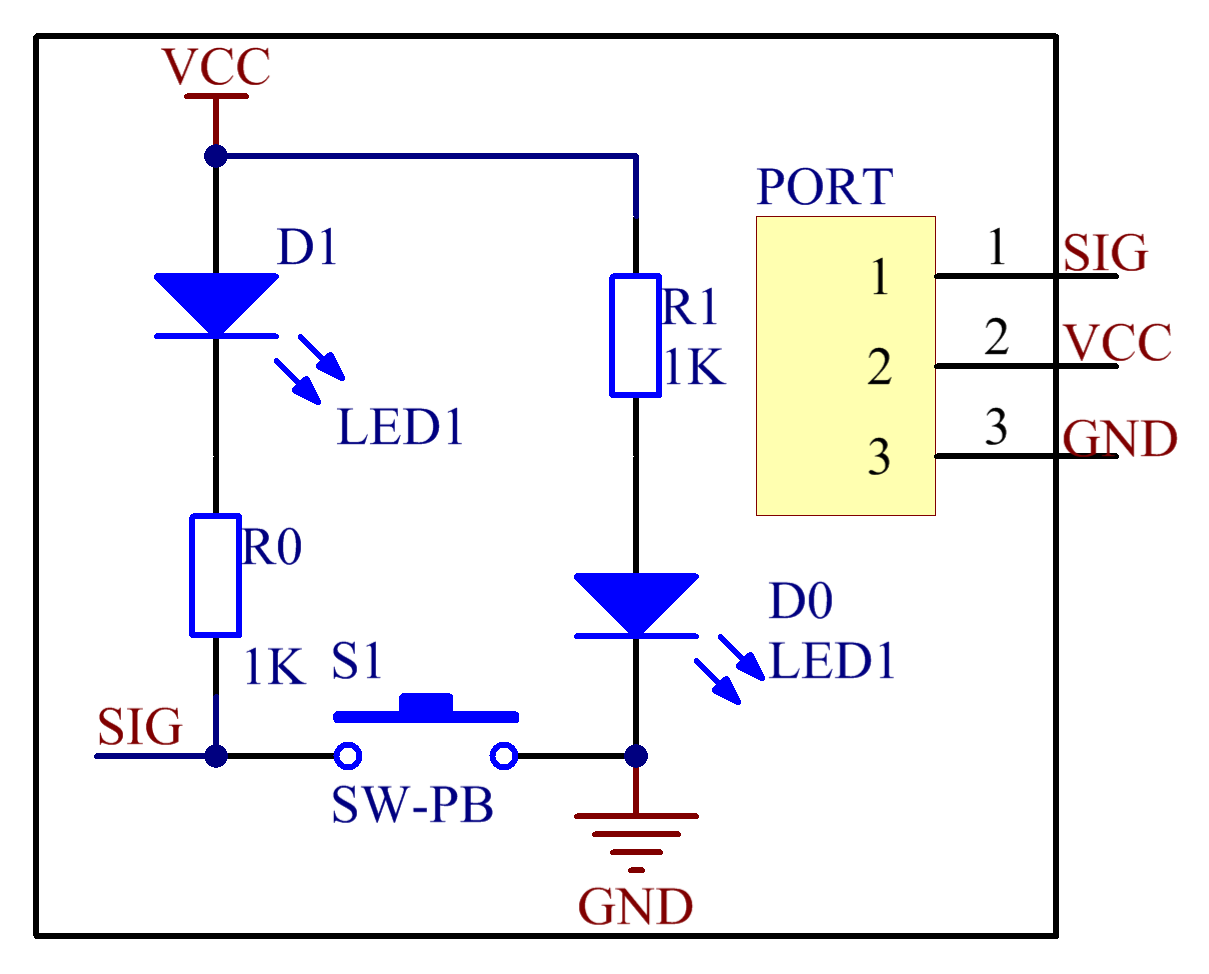
The principle is very simple. The ball in the tilt-switch changes with different angle of inclination to trigger the circuit. When the ball runs from one end to the other end due to shaking caused by external force, the tilt switch will conduct and the LED will flash red, otherwise it will break and the LED will flash green.
The schematic diagram:
Experimental Procedures
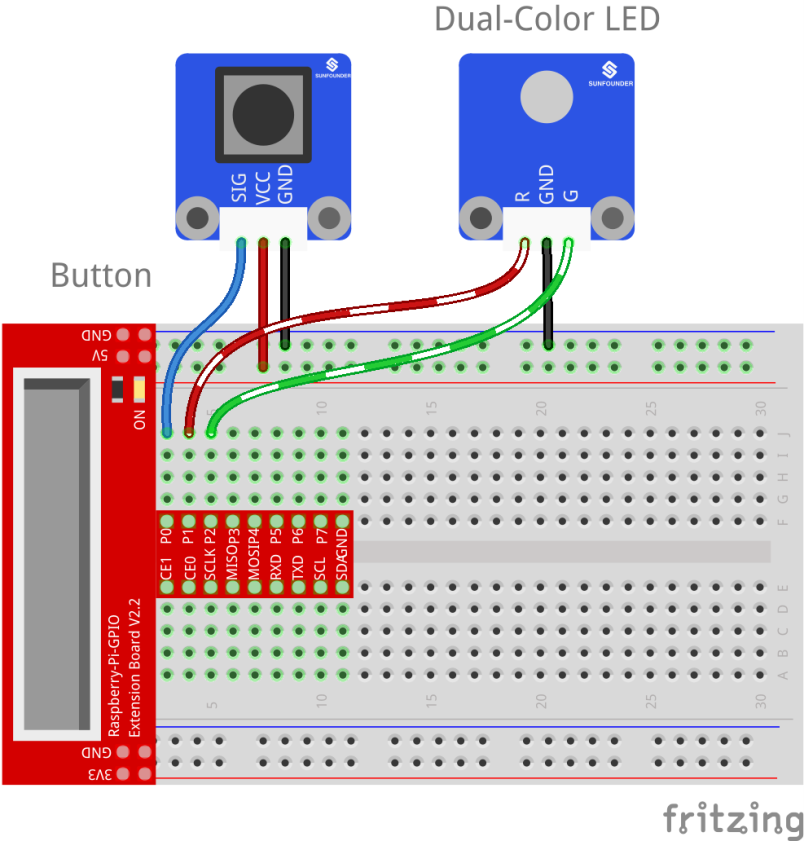
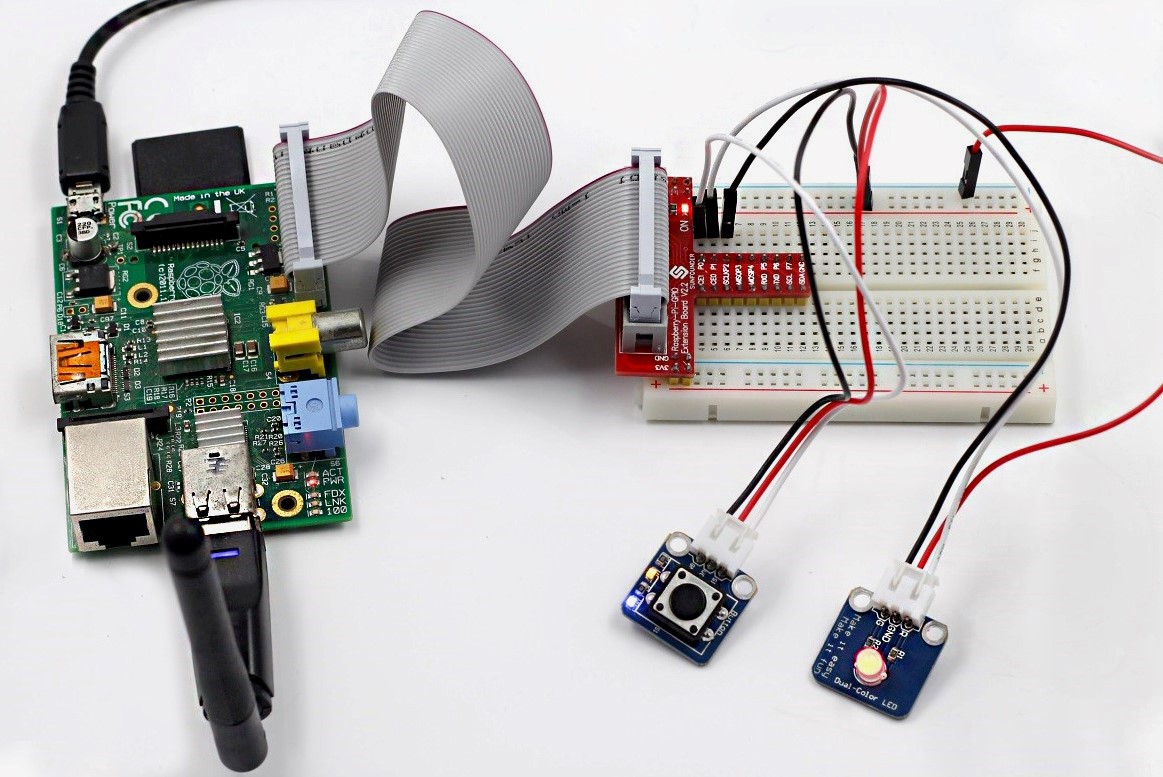
Step 1: Build the circuit
| Raspberry Pi | Tilt Switch Module |
| GPIO0 | SIG |
| 5V | VCC |
| GND | GND |
| Raspberry Pi | Dual-Color LED Module |
| GPIO1 | R |
| GND | GND |
| GPIO2 | G |
For C language users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/C/07_tilt_switch/
Step 3: Compile
gcc tilt_switch.c –lwiringPi
Step 4: Run
sudo ./a.out
For Python users:
Step 2: Change directory
cd /home/pi/SunFounder_SensorKit_for_RPi2/Python/
Step 3: Run
sudo python 07_tilt_switch.py
Place the tilt switch module horizontally, and the LED will flash green. If you tilt it, “Tilt!” will be printed on the screen and the LED will change to red. Place it horizontally again, and the LED will flash green again.
C Code
#include <wiringPi.h>
#include <stdio.h>
#define TiltPin 0
#define Gpin 1
#define Rpin 2
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(TiltPin, INPUT);
LED("GREEN");
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
while(!digitalRead(TiltPin));
LED("GREEN");
}
}
}
return 0;
}
Python Code
#!/usr/bin/env python
import RPi.GPIO as GPIO
TiltPin = 11
Gpin = 12
Rpin = 13
def setup():
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(Gpin, GPIO.OUT) # Set Green Led Pin mode to output
GPIO.setup(Rpin, GPIO.OUT) # Set Red Led Pin mode to output
GPIO.setup(TiltPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Set BtnPin's mode is input, and pull up to high level(3.3V)
GPIO.add_event_detect(TiltPin, GPIO.BOTH, callback=detect, bouncetime=200)
def Led(x):
if x == 0:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
if x == 1:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
def Print(x):
if x == 0:
print ' *************'
print ' * Tilt! *'
print ' *************'
def detect(chn):
Led(GPIO.input(TiltPin))
Print(GPIO.input(TiltPin))
def loop():
while True:
pass
def destroy():
GPIO.output(Gpin, GPIO.HIGH) # Green led off
GPIO.output(Rpin, GPIO.HIGH) # Red led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()