Python Example Program
Python Example Program is in the examples folder.
cd /home/pi/picar-4wd/examplesYou can run them by using Python3.
- keyboard_control.py
After running the example, press「W」, 「A」, 「S」, 「D」, and you can get the car going ahead, back, left, right. And the keys「4」and「6」can increase or decrease the power of the motor.
Run it by using the following command.
python3 keyboard_control.py- obstacle_avoidance.py
After running the example, the car goes ahead automatically.
It can also turn right to get around the obstacles if there is anything obstructive ahead.
python3 obstacle_avoidance.py- track_line.py
If you paste a black lane (width: around 2.5cm) on the white floor, the car will move along the lane.
python3 track_line.py- follow.py
When the example runs, the car will follow the object ahead.
python3 follow.pyPython Example Code Analysis
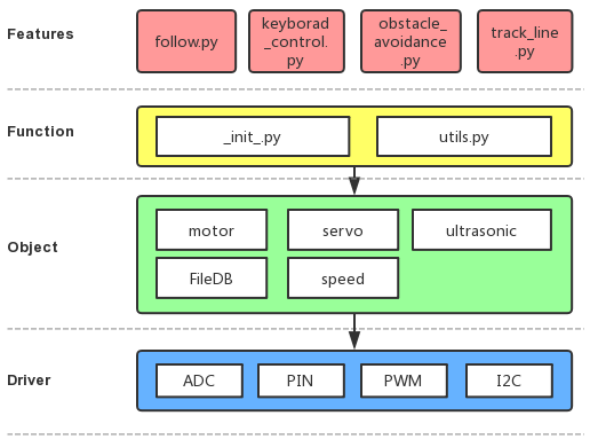
Program Structure Framework
keyboard_control.py
In the code, we use readchar and readkey to get the input state of the key, then we assign some functions to the keys by using if statement.
import picar_4wd as fc
import sys
import tty
import termios
import asyncio
power_val = 50
key = 'status'
def readchar():
……
def readkey(getchar_fn=None):
getchar = getchar_fn or readchar
……
def Keyborad_control():
while True:
global power_val
key=readkey()
if key=='6':
……
elif key=='4':
……
if key=='w':
……
elif key=='a':
……
elif key=='s':
……
elif key=='d':
……
else:
……
if key=='q':
print("quit")
break
if __name__ == '__main__':
Keyborad_control()obstacle_avoidance.py
In the code, the distance measurement radar (ultrasonic + servo) will take sample for 11 times in total (once every 18°). Then it makes judgement on the distance states of the fourth and the seventh sampling. If radar indicates no obstacle(the returned value is 2), the car will continue moving ahead, or else the car turn right to get around the obstacle.
Note: Check 「scan_step()」, 「get_status_at()」 in the 「_init_.py」for more details about the judgement on radar sampling and distance state.
import picar_4wd as fc
speed = 30
def main():
while True:
scan_list = fc.scan_step(35)
if not scan_list:
continue
tmp = scan_list[3:7]
print(tmp)
if tmp != [2,2,2,2]:
fc.turn_right(speed)
else:
fc.forward(speed)
if __name__ == "__main__":
try:
main()
finally:
fc.stop()track_line.py
In this code, grayscale sensor module will judge the gray level of the floor under the car’s head. The car adjusts the directions according to the detection values of these three detectors to follow the black line.
Note: About Grayscale judgement, refer to 「get_line_status()」in 「_init_.py」for more details.
import picar_4wd as fc
Track_line_speed = 20
def Track_line():
gs_list = fc.get_grayscale_list()
if fc.get_line_status(400,gs_list) == 0:
fc.forward(Track_line_speed)
elif fc.get_line_status(400,gs_list) == -1:
fc.turn_left(Track_line_speed)
elif fc.get_line_status(400,gs_list) == 1:
fc.turn_right(Track_line_speed)
if __name__=='__main__':
while True:
Track_line()follow.py
In the code, the ultrasonic module will take sample to form an array containing 11 elements; the module detects once every 18° and puts the distance state (0,1,2) of every angle into the array. If there is something obstructive at the right front, the detection value is [22222211122].
The array takes the 2 as a delimiter to divide the array anew. The examples above will be divided into several null elements and a [111]- value element.
The corresponding angular range of the element with a value [111] is 108°~144° (0°+18°*6=108°, 0°+18°*8=144°), and the car will turn its angle into a median 126°((144+108)/2)
Judge the distance, and keep the car away from the object about 10cm.
Note: Refer to 「scan_step()」and「get_status_at()」in 「_init_.py」to get more details about radar sampling and the distance state judgement.
import picar_4wd as fc
speed = 30
def main():
while True:
scan_list = fc.scan_step(23)
if not scan_list:
continue
scan_list = [str(i) for i in scan_list]
scan_list = "".join(scan_list)
paths = scan_list.split("2")
length_list = []
for path in paths:
length_list.append(len(path))
if max(length_list) == 0:
fc.stop()
else:
i = length_list.index(max(length_list))
pos = scan_list.index(paths[i])
pos += (len(paths[i]) - 1) / 2
delta = len(scan_list) / 3
if pos < delta:
fc.turn_left(speed)
elif pos > 2 * delta:
fc.turn_right(speed)
else:
if scan_list[int(len(scan_list)/2-1)] == "0":
fc.backward(speed)
else:
fc.forward(speed)
if __name__ == "__main__":
try:
main()
finally:
fc.stop()